


Line follower "GOOFY"
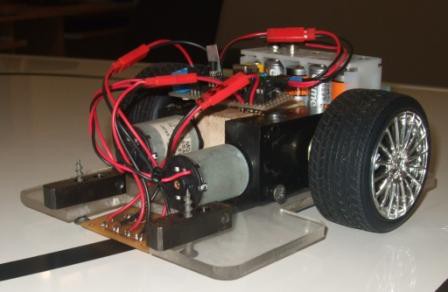
This is my very first line following robot that is built around ATMEGA8. Construction and circuit are quite simple. Such a name- GOOFY is given because robot movements are somewhat clumsy. But hey! Its still working and doing his job very well! :)
There is two geared DC motors that are controlled using PWM. Tyres are the ones that are used in RC cars. Besides-these have a nifty looking.
You may ask "Whats that tho pieces of metall on screws in front of robot? ". The thing is that batteries behind robot is a bit weighty so it lift the front with sensors (which means that sensors can not sense the line :( ). As a solution I added two screws and some parts from an old equipment in front of a base plate. Hahaaa- it works! :D
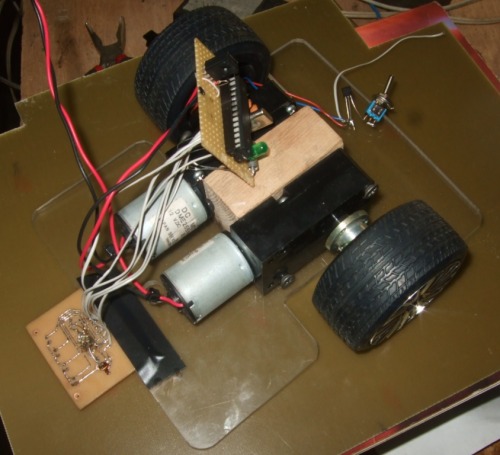
Everything started with this:
Here is a circuit if You're interested:
Hope You like it! :)
Follows a line
- Actuators / output devices: 2 geared motors
- Control method: Autonomous.
- CPU: none
- Operating system: -
- Power source: 12v 8xAA battery pack
- Programming language: C++
- Sensors / input devices: 4 IR photointerupters
- Target environment: indoor flat surfaces