


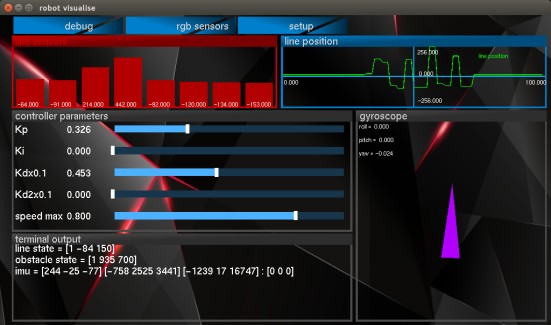
line follower debug application
line follower debug application written in C++ using opengl as GUI, written within 5 days ^_^ ; robot transmitts data via uart, in text format; on PC side is running parser from uart and in separate thread visualisation; these data are processed : line position, sensors , 9DOF, controller parameters