



Line follower bot
Hey everyone!
I'm new to LMR and I'd like to post my first robot. It is a simple line following bot. It can follow a black line on a white background and vice versa.
These are the parts I used:
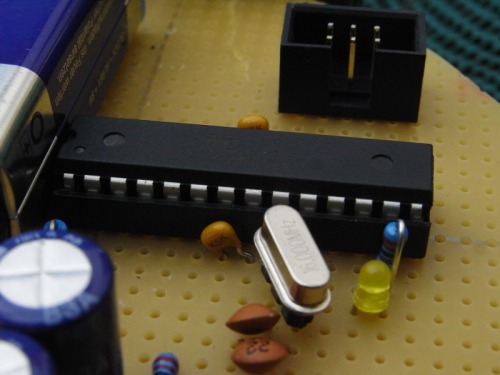
- ATmega8
- 2 hacked Servos
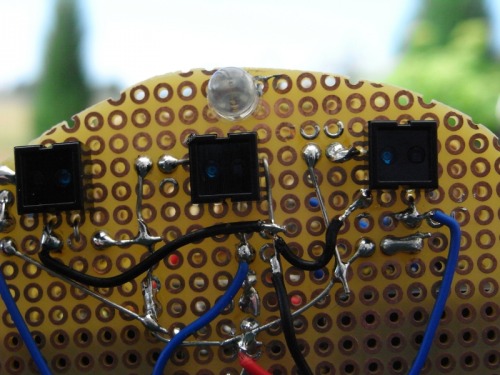
- 3 CNY70 reflex optocouplers
- 1 74HC14 schmitt-trigger
I built the robot because I got fed up with the other robot project I worked on and I wanted to get some kind of robot going. The idea of a line following robot seemed very simple. Just hook up 3 CNY70 to a schmitt trigger, connect this to the microcontroller and then let the microcontroller decide wich way the robot should go.
The robot needs a little more tweaking but actually it's pretty good at what it is supposed to do
Some more images:
Tell me what you think :)
So long
Torrentula
Following a line
- Actuators / output devices: 2 servos
- CPU: atMega8
- Programming language: C
- Sensors / input devices: CNY70