


Line Follower
Hi LMR 'ians,
This is basically a copy ( hopefully one that would be almost identical) than the Noobot by another LMR member dip6..Thanks a lot!! This was something that I had always wanted to make but never got around too...Used to be a competition in my Uni for the Electronics engineers and I was from the mechanical engineering side. Didn't have a clue back then and honestly not too much either now...:-P
Through dip6, I got the PCB boards and the rest were bought online through RS, Active Robots and Farnell in the UK. Since this was all through hole assembly components, it made soldering much much easier..:-)..
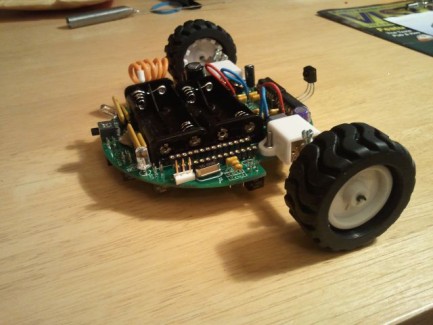
The wheel's look a little freaky as they are further away from the body compared to the original Noobot. Since I bought the wrong size of wheels, 42mm instead of 32, I had to modify it to avoid it clashing against the PCB. I will anyway get new wheels to suit the design. I've managed to get it all together now, including programming the 'brain' of it and it doesn't start!!...Am currently checking and rechecking where I have gone wrong but the problem does not seem to present itself. I used an Arduino Duemilanove to program the Atmega328 instead of the TX,RX ,GRD connections on the board itself.
I'll keep on trying to get it working...worst case scenario....I have another board to start with...:-P
Line Follower
- Actuators / output devices: 2 x 150:1 SANYO micrometal gear motors
- CPU: Atmel ATmega328
- Power source: 4 x AAA rechargeable batteries
- Target environment: indoors