



Light Following Robot

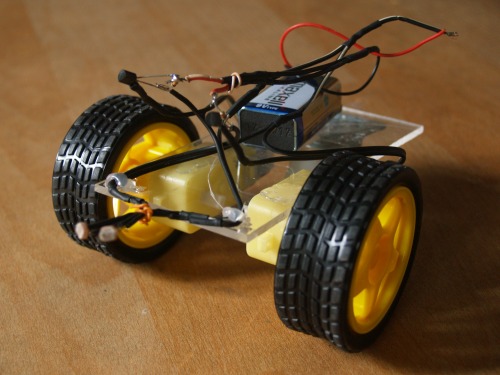
The gear motor wheels, multi-directional wheel and the plastic sheet. I cut out 6 x 13 cm plastic for base.

Glued the wheels to make the body and connected the motors to the components.
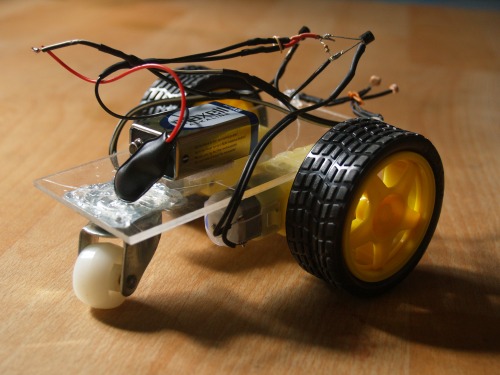
After its completed.
Robot Schematic
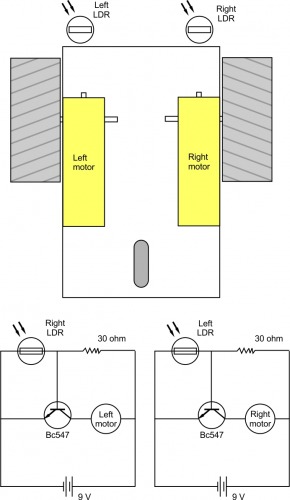
Light Following Robot without using microcontroller. This wheeled robot does not avoid collision. It runs towards the light or just brighter areas.
- Control method: non-autonomous, moves toward the light or bright areas
- Sensors / input devices: 2x LDR, 2x BC547 Transistors, 2x 2 x 30 ohms Resistors, 2 x Gear motor wheels, 1 x multi-directional wheel, 9 volt Battery.
- Target environment: indoor