



Light chasing autonomous rover
I started 2 years ago with an autonomous rover that chases light and avoids obstacles. We're now 11 versions further and version 12 is almost ready! Eventually the rover must cruise around without hitting any objects and return to a charging station when the battery runs low. I'll show you the evolution of the rover, starting with version 2 (version 1 was crap)
Version 2
First version that could drive around with obstacle avoidance in the front.
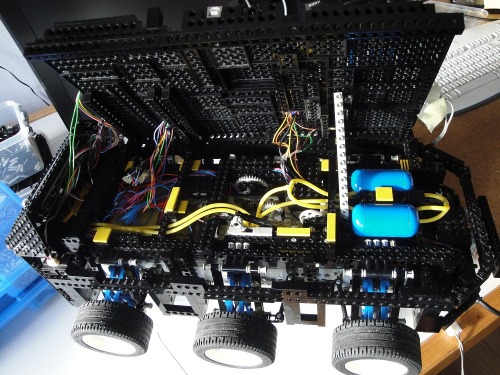
Version 4
- added double suspensions as the robot was getting too heavy
- added a pneumatic system with compressor and a piston that comes out of the bottom for charging purposes (never used)
Version 5
- new steering design as version 4 had problems with backlash
- installed a "hood" for easy access to the steering gears
- inserted smaller battery to reduce weight
Version 6
- Reduced size to make the robot more agile
- Removed the pneumatic system
- Added two LDR's so the robot can chase a light source
- Added some really cool neon lights!
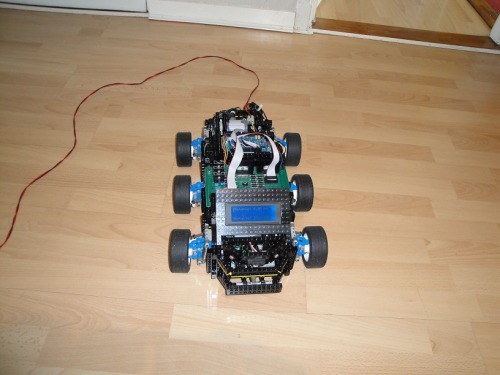
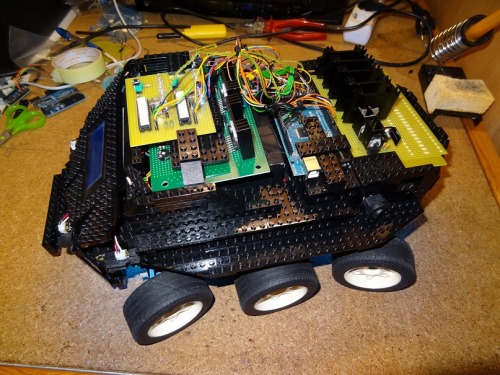
Version 9
- New drivetrain design: 4WD to give the robot more torque (and avoid broken gears)
- Still problems with steering: added 2 other microcontrollers to control the steering of the front and back wheels seperately
- The hood is back again for easy access and adjustment of the steering gears
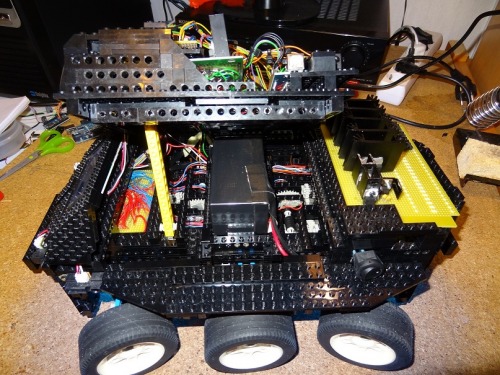
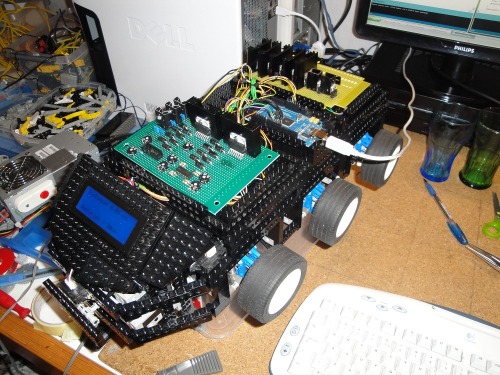
Version 10
- Added a custom made PCB with connections for everything: motors, sensors, I2C, LCD...
- New slimmer 4 wheel design for better agility
- Added 2 overexperienced drivers!

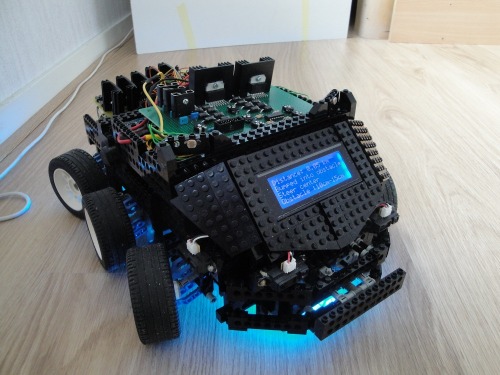
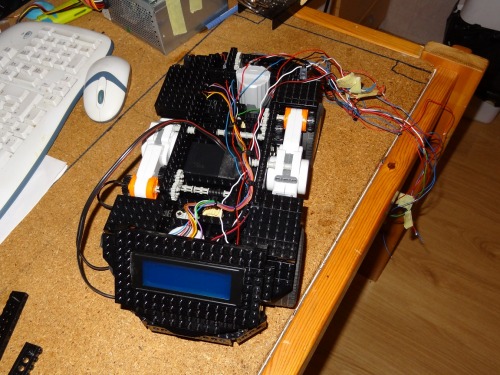
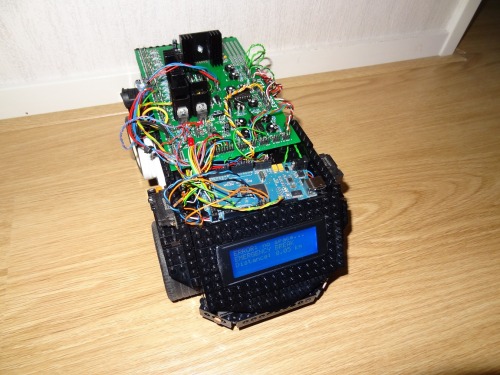
Version 11
- Version 10 had still problems with steering and the consequenses of mechanical backlash: added two NXT motors with built-in rotary encoders for more precise controlling of the steering
- Fired the overexperienced drivers due shortage of space
Version 12
Version 12 is coming up soon! Total new design with caterpillar tracks as a wheelbased robot isn't agile enough for a living room...
Chases light source and avoids obstacles
- CPU: ATmega 1280
- Programming language: Arduino
- Target environment: indoor