


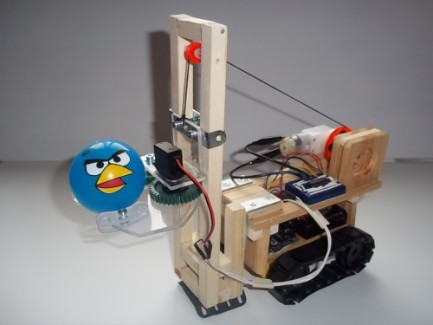
Lift robot
Here it is the "lift robot". It will grab an object and after that it will place it on a basket. It uses the tracks of the very famous "yellow drum machine" and a lot of wood :) Actually I am planning to replace the wood parts by acrylic very soon.
The main body of the robot is made with the tracks of Solarbotics, a TV antenna piece, a part of a small toy, the Picaxe 28x1 and the battery holder. I plan to re-use this base for multiple robots...
Updated: This short video was recorded on July 03 ==>
==========================================================================================
Updated on July 03
Finally I got all the pieces assembled! The GM3 motor is doing a great job lifting the weight without trouble and connecting the second L293D was much more easier than I expected. I get a little problem though, the robot is rolling forward, that is why I will need to add some counter weight at the back or a ball caster under the frame. Hopefully this will be fixed on the next update.
THE GRABBER.
The grabber is made out of 2 gears of the Vex Gear Kit, one micro-servo and many acrylic parts.
It has been changed too. All wood parts were replaced by acrylic. This process was a bit long but at the end I really like the look of the new grabber. To cut and bend the acrylic I followed the techniques on this link
| First version of wood | 2nd version of acrylic [updated on July 03] |
============================================================================================
This is the top of the robot. This robot takes 2 driver-motors, 1 for the tracks and 1 for the pulley. Actually I got a lot of fun connecting the second driver-motor (the one on the blue mini-board) to the Picaxe 28x1. Also, I get some trouble finding the right motor to be controlled due to the starting current. Fortunately the GM3 gear motor solved my problem with the starting current...
Here some pictures of the GM3 gear motor that will pull up all the weight. I read on the documentation that the double-flat output shaft on the GM3 gear is ideal to take rotational load.
This is the frame and pulley that will support the grabber. I got the pulley and a metallic bar from an old Meccano and the frame is made out of some bars, glue and clues.
Collect small objects and place them in a basket.
- Actuators / output devices: 1 x Micro servo, 2 Solarbotics GM9 - Gear Motor 9 for tracks, 1 GM3 Gear Motor
- CPU: Picaxe 28x1
- Power source: 4.5V (3AA)
- Programming language: Picaxe basic
- Sensors / input devices: 2 momentary pushbuttons
- Target environment: indoor