


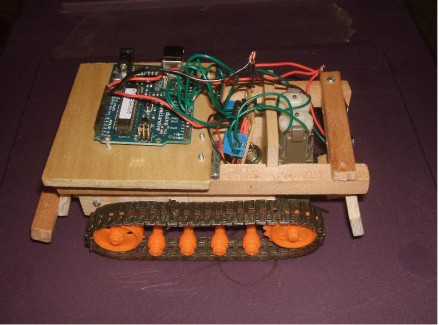
Leo
Main Goal : To listen for a knock at the door and then notify the human occupant of the house. Eventually will be an AUV, complete with charging station.
Sensors not yet implemented :
Voltage sensors
Hall Effect Sensors on the front idlers (ordere)
Sonar Range Finder
IR Range Finder
PIR sensor
 |
| From Leo the Bot |
Ghetto Hinges or how to upcycle your soda can into bad bot parts
Got them replaced with regular hinges but still need to replace the back bumper, I'll post a pic of it if anybody is interested.
Goes bump in the night
- Actuators / output devices: Tamiya twin gearbox
- CPU: arduino 328
- Operating system: C
- Power source: one 9V battery for MCU
- Programming language: C
- Sensors / input devices: two front bumper switches, rear bumper switch, mesmic 2125 Accelerometer
- Target environment: indoor on smooth surfaces