


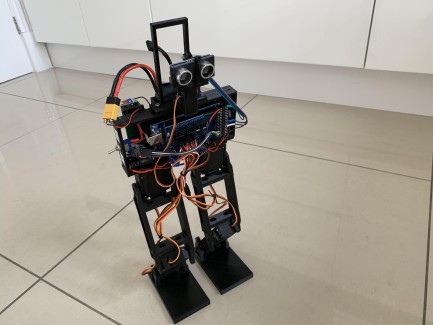
Humanoid robot legs go for a walk
Designed using Tinkercad and printed using Prussa Mk 2 in PLA.
Just 6 bolts for fitting legs and handle part to body along with servo fittings.
Controlled by Bluetooth using ArduinoBlue and iPhone. Kneels, stands, walks forward, backwards as well as left and right (although at this stage a little wobbly). When walking selected has ultrasonic detection to stop and consider whether to go forward, backwards, left or right automatically.
Video shows first walk.