



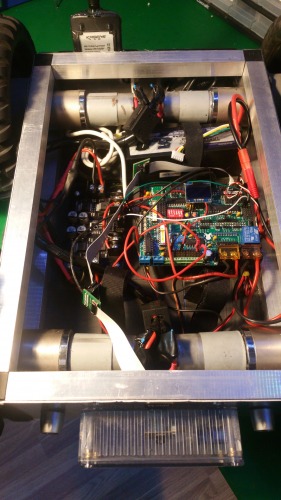
Large robot rover
It is about 50x50cm with 20cm wheels and uses PiBorg Diable DC motor controller.
It has the same control system as the Small Rover but it do not use the internal DC motor controller.
More info see: steelsquid.org
- Steelsquid Kiss OS
- Control card: Raspberry Pi with PIIO Board
- Control it on a HTML5 webpage via WIFI.
- It has 4 Gimsonrobotics DC motors controlled by PiBorg Diable DC motor controller.
- A Raspberry Pi camera mounted on a servo to tilt up and down.
- The servo is connected to servo port 1 on the PIIO board (use that to tilt the camera).
- And also 2 small LED light that i drive with the adjustable step down regulator and POWER output on the PIIO board.
- Drag on the right side of the screen with your mouse or your finger to control the movement.
- And drag up and down on the left side to tilt the camera.
- Double tap on the screen to toggle the light.





Drive 4wd robot via wifi and html5
- Actuators / output devices: servo
- Control method: WiFi
- CPU: Raspberry Pi
- Operating system: Steelsquid Kiss OS
- Power source: 14.4V NiMh (12 x AA) 2500mAH
- Programming language: Python