


Landshark
July 24, 2009 Update:
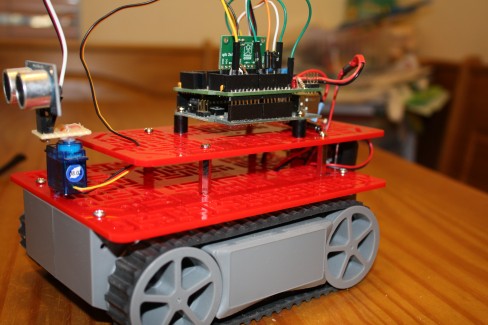
Upgraded to use the new Pololu chassis plates.
This is my second bot. This one uses a RP5 tracked chassis that I bought from Pololu. It also uses Pololu's Qik2s9v1 serial motor controller. Currently the only sensor is a Parallax Ping attached to a servo for scanning. I plan on adding some Sharp IR's for close in detection and an optional line-following kit.
I made an Arduino library for the motor controller. It can be downloaded from: http://code.google.com/p/qik2s9v1arduino/
Simple object detection & avoidance. Testbed for tracked locomotion
- Actuators / output devices: 2 geared motors
- Control method: autonomous
- CPU: arduino 328
- Power source: one 9V battery for MCU, 6xAA for motors
- Programming language: C++
- Sensors / input devices: Ping on a sensor
- Target environment: indoors for now