



Ladybug Hexapod
Yesterday I finetuned the code for ladybug independent moves.
I excluded the IR TV remote controll functionality because infrain function on 08M is somehow unreliable for fast moving robot controll.
The code is now optimised for smarter object avoiding and dead-ends resolving.
There are two thresholds:
- obstacle is closer than 20 cm - go to the right
- obstacle is closer than 5 cm - go 10cm back the turn right

Three servos are now better synchronised and "pauses" between movements are optimised for 4,8V battery voltage (movements are slightly slower than at 5V)
Bellow you can see it from the down.
Stickers on legs are to make it sliding.

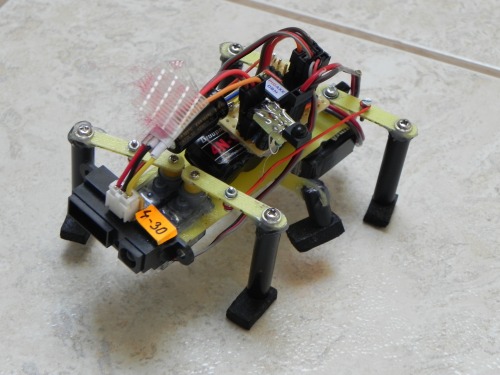
Under the skin.
Body and legs are from PCB material without copper layer.
Black part of legs is from plastic "distance tubes" used for pcbs mounting.
Feet are from self-adhesive rubber foam.
IR sensor (still in photo) is not there anymore.
This is the size. With coat on.

Ladybug Hexapod 2 - The best home videos are here
Ladybug hexapod 1 - The best home videos are here
runs, avoid obstacles
- Actuators / output devices: 3 servos
- Control method: autonomous
- CPU: Picaxe 8M
- Power source: 4, 8V Nicd 120mAh
- Programming language: Basic
- Sensors / input devices: Sharp IR
- Target environment: bathroom