



kuruma
25.02.2011
i decided to try something else with my NXT - robot with other than differential direction control. i built test vehicle for ackerman control (but with the same angle change for both inner and outer wheel, so i dont think it is the pure ackerman steering)
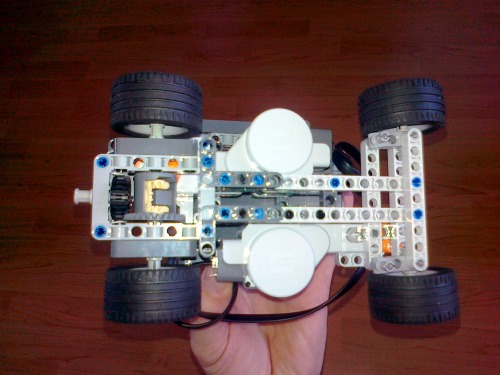
i have just built the base with rear differential, two motors and smartbrick. no sensors yet. the plan is touch sensor front and rear, USG on top, probably on top of the third motor. remaining port will be used for line following as usual :)

bellow is detail of the bottom part holding the rear differential together with front steering wheels
28.2.2011
ok, the body is complete. i added USG sensor, though not yet used in program. it is connected to the servo that is steering front wheels so that robot is able to "look around". i also had to redo the gearbox and i put the "clutch wheel" in it, just in case. i attached video with first sample movements as well.