



KT (Pronounced Katie) the Kitty Terrorizer
Hey everyone! Many of you remember my Dog_Bot project I was working on. Well after a move and a bunch of set backs, I cancelled the idea. So instead Im building a little buddy for my cat to play with, enter KT

(please excuse the terrible pics, Im working on better ones!)
The basic concept of motion was taken from this bot here
http://www.instructables.com/id/Simple-Walker-Robot/
The only significant differences in my desings are a wider body (to make room for the breadboard) my use of two power sources and using some craft wood instead of spatulas fr legs. All of the range of motion is preserved however.

some pics of the initial body
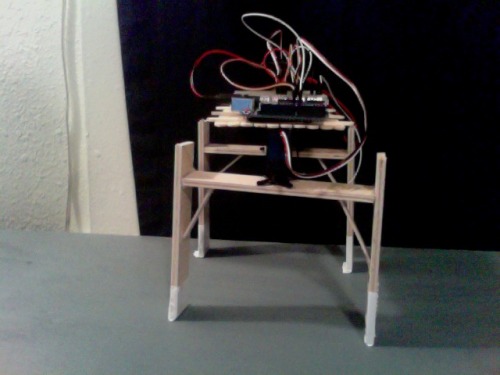
At this point, all KT could do was walk ( in an impressivly straight line I might add). So I put her down on the floor to see what the cat would do..... and success! My cat (named Opie if your curious) loved it! KT had the cat running around, chasing and just loving life. There was however, one flaw that came up several times.... my cat would get playful and it would without fail knock a wire or two from KT loose, resulting in a power loss.
The solution? KT needed a body :)

Thats just a casing made from popscicle sticks and Uber-heavy paper. Just a prototypr until I get some very light gaugr metal from work. As a prototype though, it worked extremely well. Not once did the cat knock anything loose after the body was added!
You might also notice this back shelf that was attached... What does it do? Well it serves two purposes,
1.) it forms a tiny shelf that is perfectly measured to keep the battery cases from rolling around or falling off
2.) It provides space for future add-ons!
By the end, I plan to have a tiny laser pointer up on here, so when the cat is around, the laser will activate and send the cat on a merry chase :)
Im getting a little scatter brained right now but here are my next steps...
1.) Program the IR sensor in
2.) Work on "turning" script so he can change course
3.) get the laser pointer attached
4.) make him look good (MO BLING, SON!)
Anyway thank you all for reading, i really do appreciate feedback and alternative Ideas. Again, sorry fot the poor quality in pics, hopefully tomorrow or so i'll be able to get better ones up.
You stay classy LMR!
*************Update 12.15.12*************** So I made a very sad realization today, my cat does not care about this robot or laser pointers at all! Seriously, what kind of animal is this? Well since the cat ont care, I decided to change up the bot. I started with a more sleek look, since I didnt need the back deck for the laser pointer. An old shoe box came in handy as the body. After I painted it up, I threw it all together and here is what I got:

Spoiler. I'll be adding some cool LED stuff to the front here.
Here are some more pics:


The basic concept is the same however....
Im am really running into one major problem... traction. These legs really are not ideal. When I let the robot walk on the wooden legs it just runs in place, when I added some higher friction material it struggled to go an inch. Im not sure what to do from here. Any suggestions on materials for feet?
********************Update again 9.15.12*****************
So it has been a very productive day! Thanks to Lumi pointing out my design error, I had KT up and walking in no time. If you didnt read the particular comment Im reffereing to, the problem was that KT's legs were completely vertical. I needed one (or both) of the legs to be angled so they would raide off the ground. Thanks Lumi, I owe you one!
Anyway, up at the top is a quick vid of KT on her maiden voyage on better legs!
You will also notice the little light display that goes on during the startup sequence. I wanted to add a little gusto to the robot, something to raise the bar :) Hope your guys enjoy, please leave some feedback!
PS: Tomorrow I'll be adding the IR sensor and working on turning sequences!