


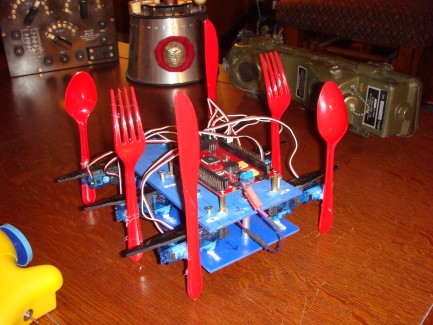
Knives, Forks and Spoons
Knives Forks and Spoons is my homage to Chopsticks and Chopsticks Jr.. (I hope to end up like Chopsticks Jr. - Beaten to death by a Model during a photo shoot.)
But sereusly I learned a lot.
I got the idea for fame based walking - that's where each loop thru the main line program increments the frame variable to the next set of servo positions. I switched to Rechargeable batteries. I made the master of the Upper leg and cast copies of it. (Thanks to http://familab.org/blog/ For Tom not being able to take the resin and silicone back on the plane.)
And as a blast from the past its ROBOTGOLDFISH Vs. CALIGULAhttp://www.youtube.com/watch?v=jO_uuQ_O_dM&feature=player_detailpage
It lets me learn to walk.
- Actuators / output devices: 12 mini servos
- Control method: blind
- CPU: Spider controller
- Operating system: Adruino
- Power source: 7.2V NiMH
- Programming language: Adruino
- Sensors / input devices: none
- Target environment: Coffee Table