


K.L.A.S
Just fixed some URLs to images, no real updates, this bloke has been disassembled for ages.
This is my entry for the 2011 Swedish National Robitcs Championship. It finished on a shared last place, since my code was written for dark lines on a light surface and I forgot to change parts of it :(
As you can see I've built the chassis from entirely from Meccano. This is because I happen to have quite alot of it. It's a great building material.
The CPU I've decided to use is the Arduino Uno. I just hope I won't run out of digital pins All digital pins are in use, just four more analogs left I ended up using all pins but two
It has a dumpster-style arm that goes down and holds the object, so it can drag it.
He sees with a Sharp GP2Y0D805Z0F Digital Distance Sensor 5cm and five QTR-1RC.
The TAMIYA gearbox is powered by two Brushed DC Motor: 130-Size, 6V, 11.5kRPM, 800mA Stall.
The first design looked like this.
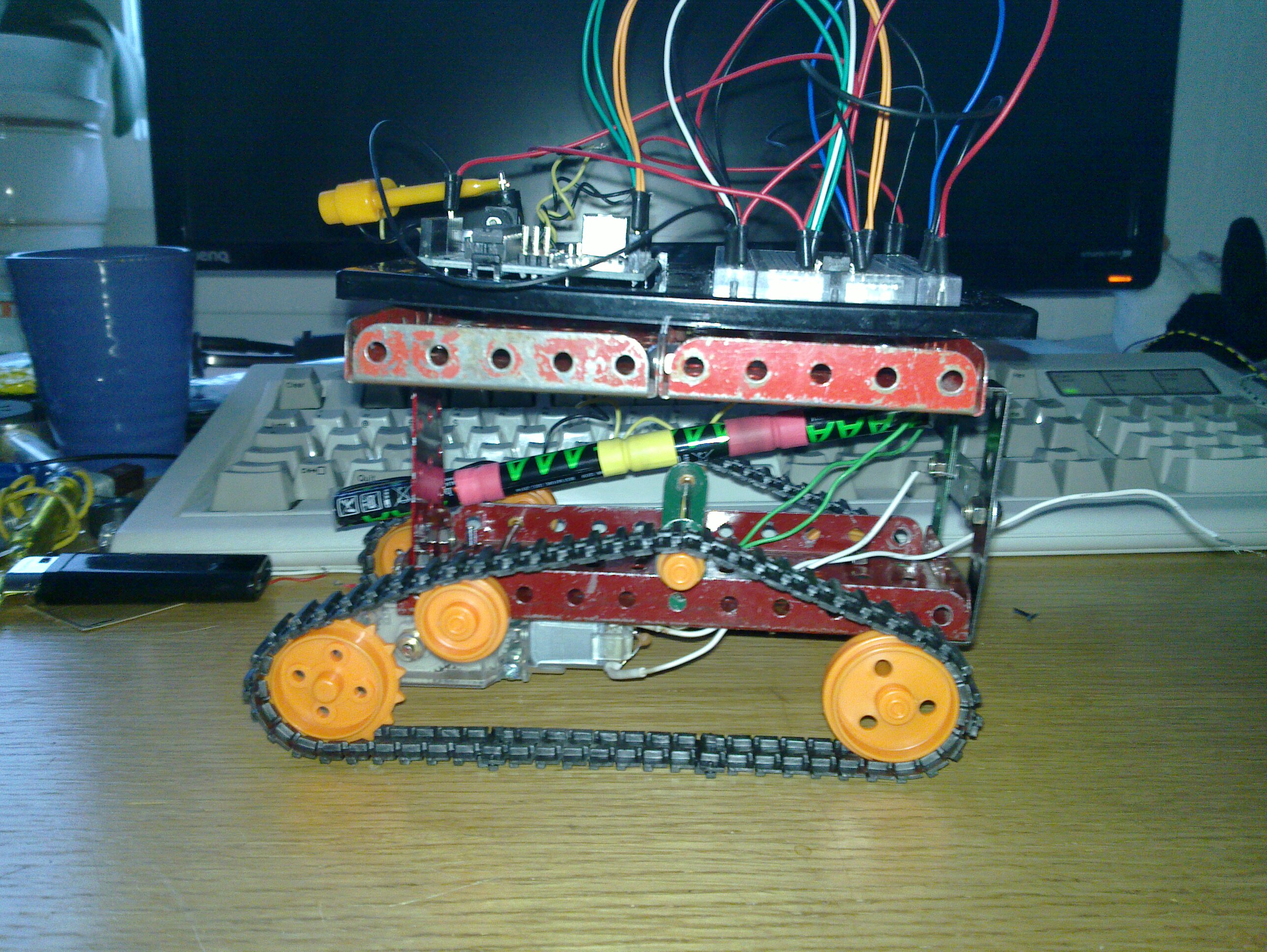
It had some problems, mainly there was too much belt in contact with the floor causing it to turn like crap.
The second design looked like this.
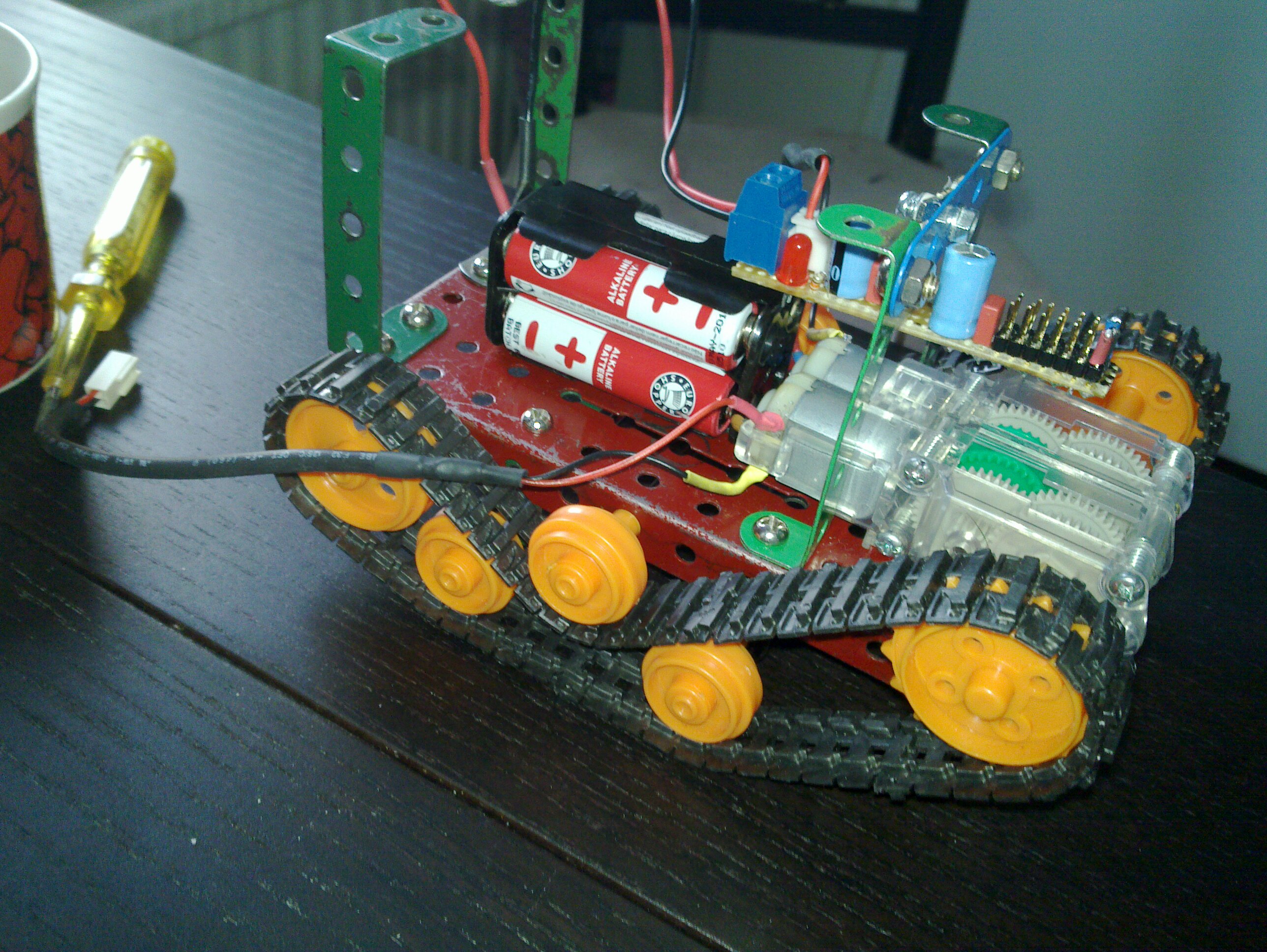
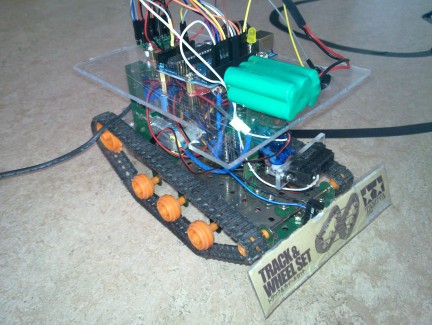
I needed more space so I redid the design(again) and ended up with the picture you see at the top, more space and just better turning capabilities.
Here's a picture of the motor controller, it uses an L239D.
Image of the power supply before I broke out it from the veroboard.
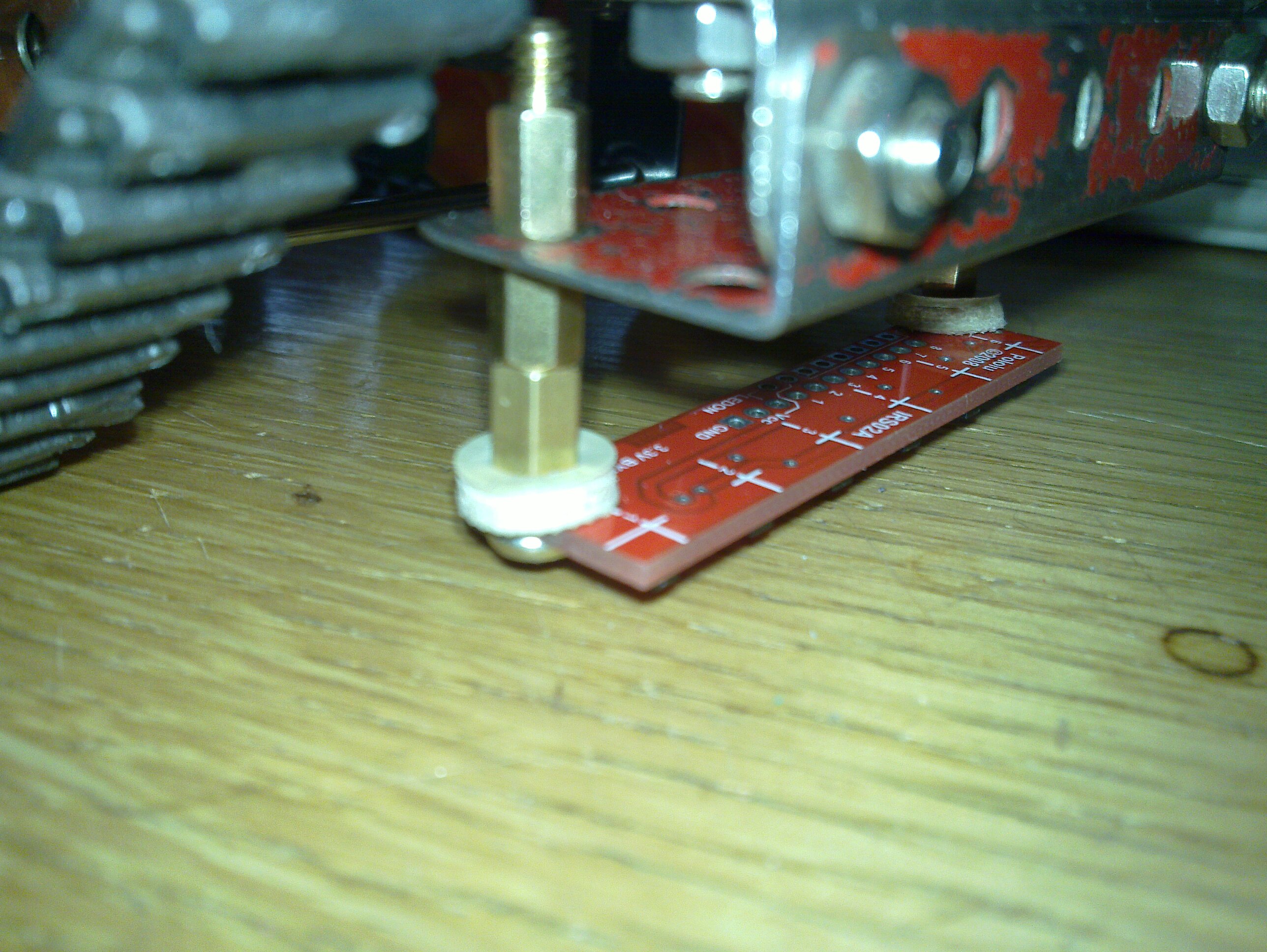
Here's an image of the backside of my linesensors:
Picture of K.L.A.S at the terrain track, failing horribly because he lost his left track(which didn't make his turning capabilities any better)
Here's the third design.
I'll be uploading videos later.
Update: 2011-01-24
Wohoo! IR-sensors mounted in the front, pictures coming in the morning
Update 2011-01-28
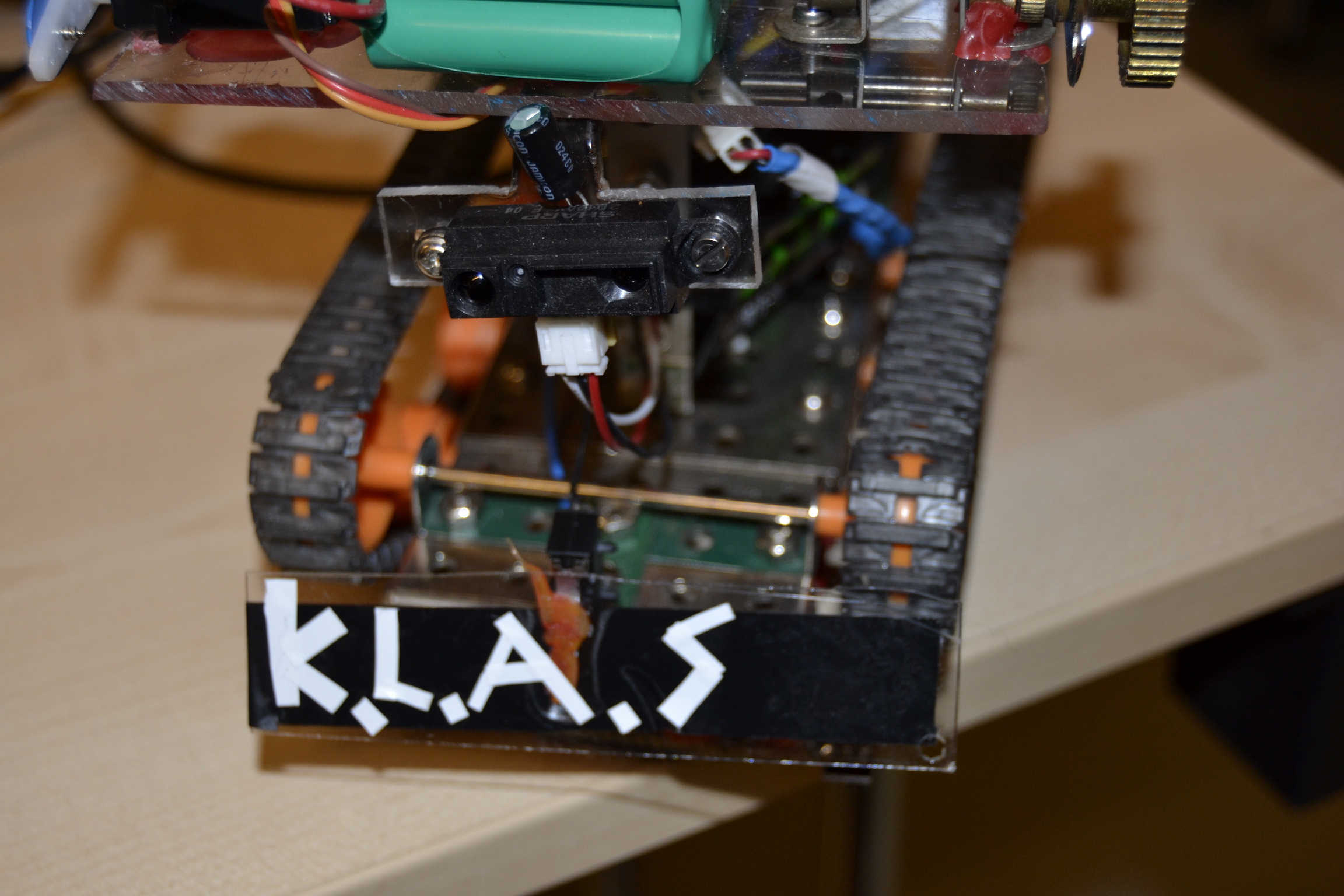
IR sensor pictures.
From the side.
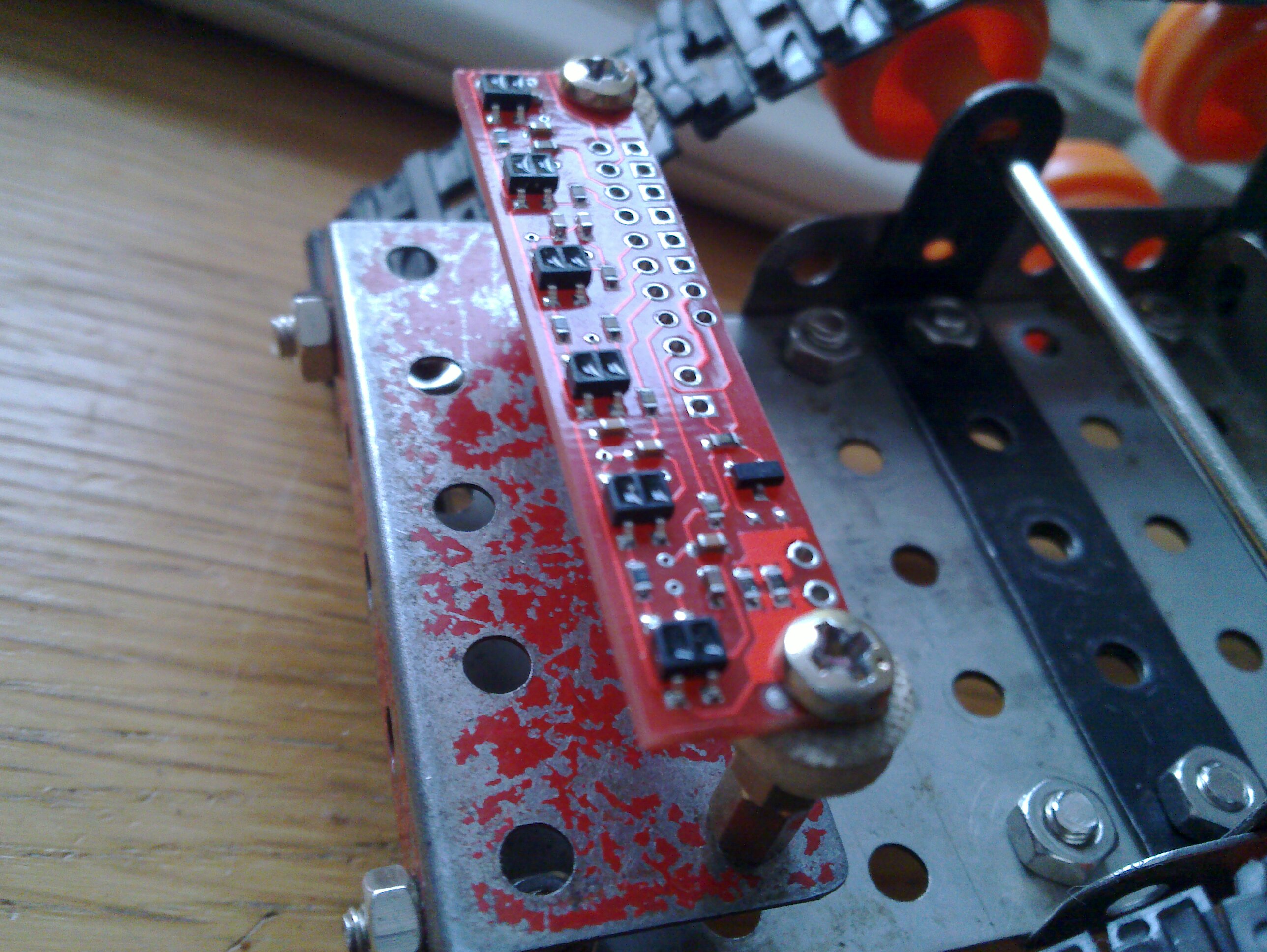
Upside down.
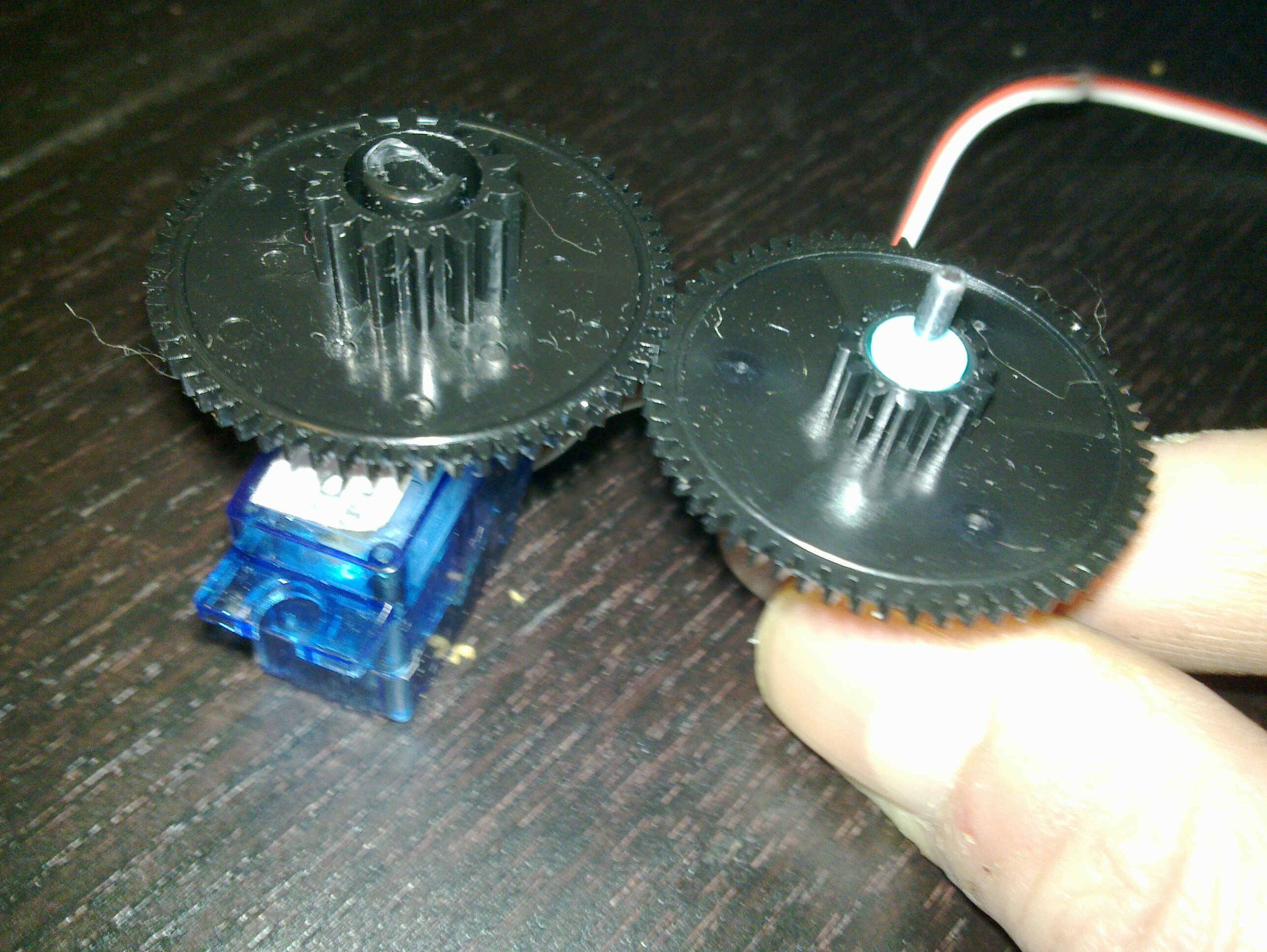
2011-01-29 Gripper cogs
Cogs! Finally found some I can use. I found them in two old CDROM drives I had lying around. The drives have at least five years between them, come from different brands and one is a DVD burner and the other one is just a CDROM reader. Imagine my joy when I realized they used identical designs for sliding the tray in and out :)
2011-02-03 Motor controller
Although I built a nice little L239D-based motor controller I've decided to go with Pololus Pololu Qik 2s9v1 Dual Serial Motor Controller instead of my home made one. It saves me some pins and will hopefully save me the work of writing a library to talk to the L239D.
2011-02-15
Object avoidance is sort of working.
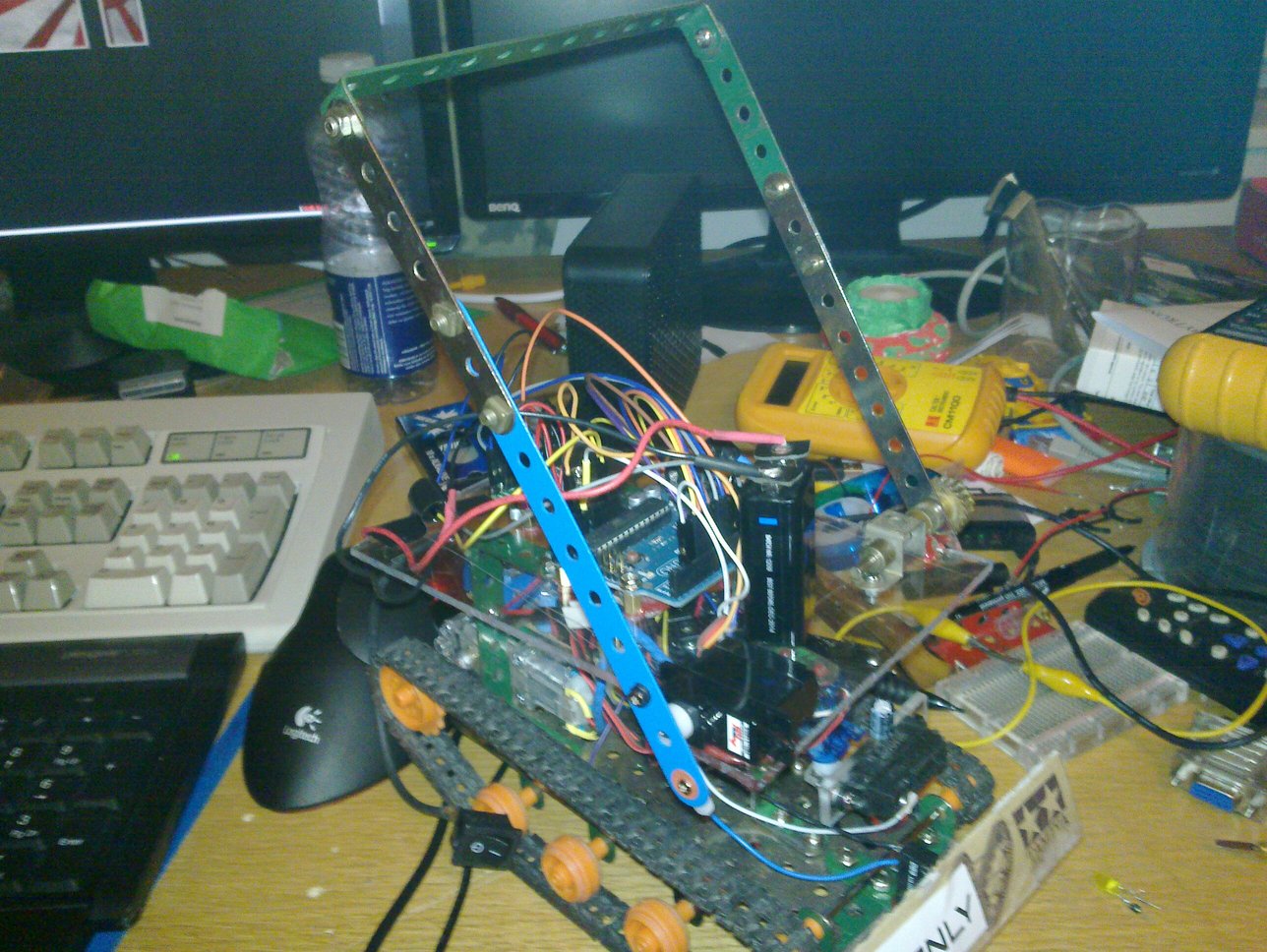
2011-03-03
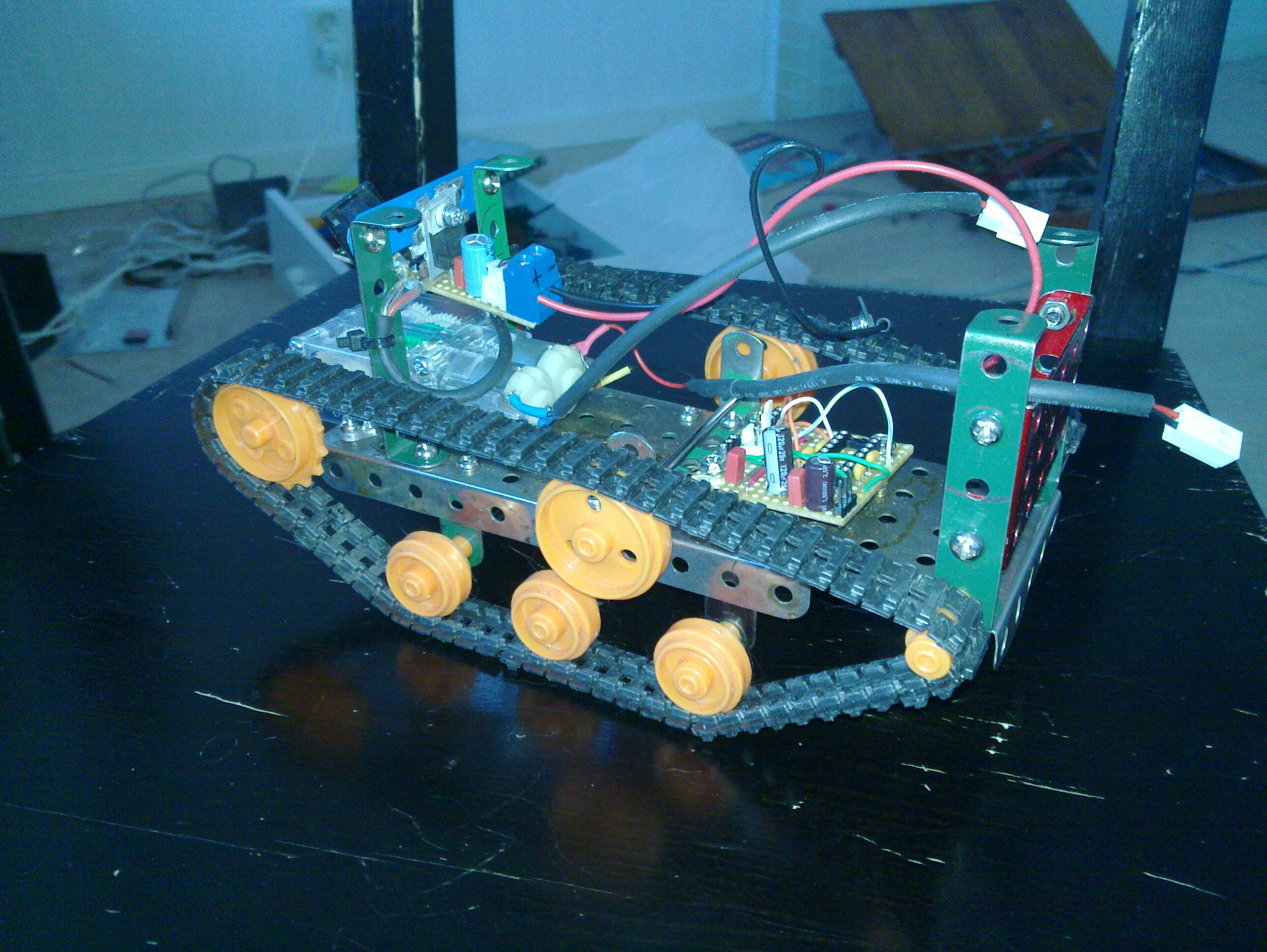
Object avoidance is finished(for now), linefollowing is at a basic stage, I need to rebuild the linefollow-array first, since two of them broke, 5x QTR-1RC should be at my doorstep in the next few days. Oh, new picture too.
2011-03-03
Win penthatlons
- Actuators / output devices: Tamiya dual gearbox
- CPU: arduino uno
- Power source: Ni-MH batteries (7.2v total)
- Programming language: C Wiring/assembler - Arduino
- Sensors / input devices: Sharp GP2Y0A21YK0F IR sensor, 5 x QTR-1RC, Bump switch
- Target environment: indoor