


Jeffrey The Quadruped
Hey guys,
Just found out about LMR and wanted to share some of the robots we have made in past. (so, I will post 4-5 more projects soon)
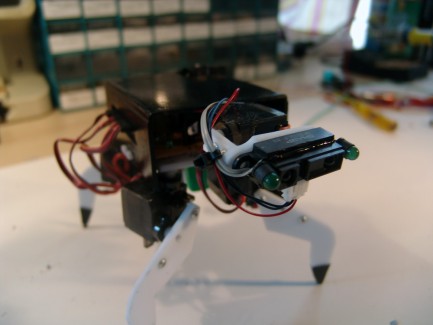
Jeffrey The Quadruped is a quite small walker with 4 legs. It has printed circuit board with a custom arduino setup, using an Atmega328.
It has a Sharp IR Rangefinder attached on 2 servos and uses a simple rotational object tracking algorithm to let him create temporary low resolution visual maps. This way it can stay on a table, stay away from objects and even track your hands with a single sensor.
Programmed it to be a pet robot. It can interact with humans at a very low (but cute) level.
Here are some more photos:
And some photos from the first prototype (before the casing and printed circuit board):
Planning to build a dock for it to automatically charge itself in future.
It is a pet. It can stay on tables without falling, navigates around via IR sensor, interacts with people
- Actuators / output devices: 2 micro servos, 8 mini servos
- Control method: Full autonomous
- CPU: Atmega 328
- Operating system: N/A
- Power source: 7, 2V 800 mAh LiPo battery pack
- Programming language: Arduino
- Sensors / input devices: Sharp IR
- Target environment: indoor