



Jasper
He just avoids objects right now.
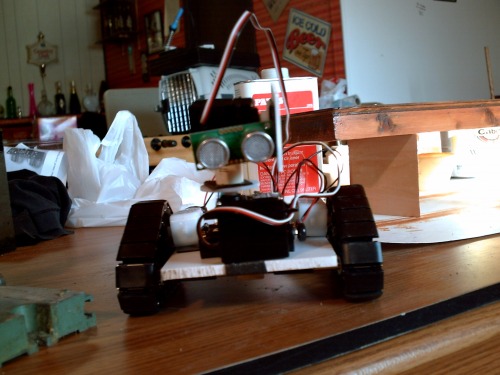
Right now he just has 1 servo, 2 geared G3 motors with tracks, and the Picaxe 28x1 vA.5 firmware.
I have added the code which I modified from the start here robot and the how to on the SRF005 node.
He first started to twitch his servo because of the pulsout command for the SRF005 sensor. I added a pause to his pulses and now the twitching is minimal. This is because even though it is on separate pins there is still a pin on the Picaxe 28x1 assembly that is giving the servo a pulse also causing it to move. Adding a pause of 10 milliseconds before and after the pulse helps this as you will see in the video. :)
If you make a start here robot with the SRF005 or any other pulsout sensors (Sonic sensors) feel free to use the code attached to this bot. :)

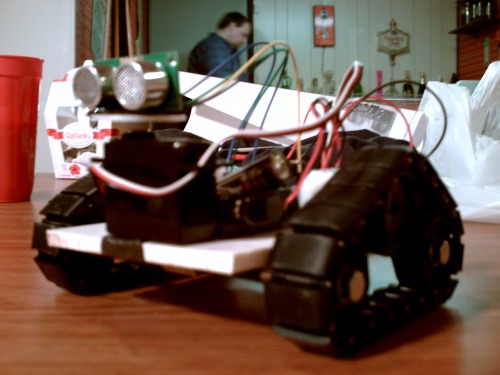 I am in the background on this one lol... :P
I am in the background on this one lol... :P
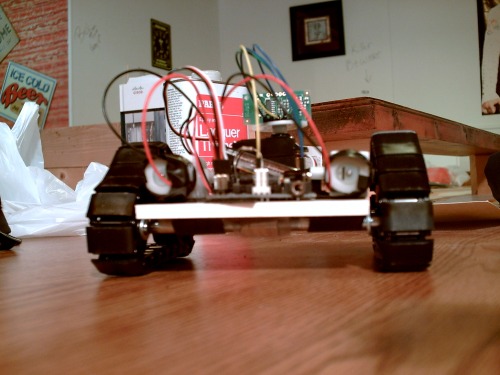 Cold beer here! W00T!
Cold beer here! W00T!
I do thank everyone who has helped me with questions and Fritl for starting all of this mess. lol :P
Update: 1/28/2009 Video added and updated code. Servo added and object scanning mode added. Pictures below.
Update: Feb 27 2009
He is complete since I am going to change to the serializer .NET :D
Avoid objects, navigate around via ultrasound, can lock on in scan mode
- Actuators / output devices: 2 geared motors, 1 Servo
- CPU: Picaxe 28x1
- Operating system: Picaxe basic
- Power source: 4.5V (3AA)
- Programming language: Picaxe basic
- Sensors / input devices: SRF005