



Jade Rabbit - the moon cake delivering robot
1/19/14 - Outdoor testing to follow a hexagonal path. Direction is determined by HMC5883L.
1/18/14 - Arduino Uno is replaced with a Mega.
1/6/14 - Digital compass is operational.
1/3/14 - GPS is relocated to the outside of the body.
12/30/13 - A GPS with LCD is done.
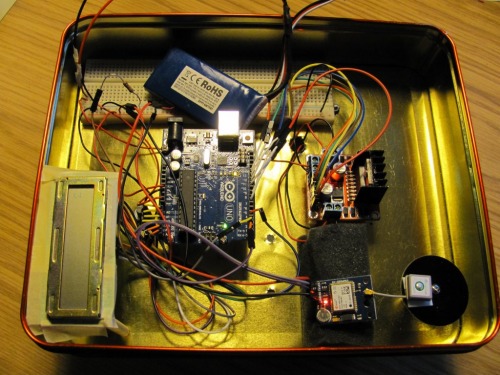
Initial outdoor test showed the longitude, latitude measurements can vary by up to 10m.
Therefore, the indoor movement is not practical. The 2-1/2" Du-Bro wheels are good for driveway and parking lot navigation.
Autonomous waypoint navigation
- Actuators / output devices: 2 DC gear motors
- CPU: Arduino Mega
- Power source: 7.4V Lipo
- Sensors / input devices: GPS, sonar, digital compass