



Issy Goes Fire Fighting
I've built several fire-fighting robots, and several walkers, but this is my first walking fire-fighting robot. Issy will compete in the Canadian National Robot Games this November, and then the Trinity Fire Fighting Robot Contest next April.
The first Issy was originally built for Mech Warfare earlier this year. This new version is about 2" shorter in both the width and length directions, a neccesary adjustment to get him inside the rules of the competitions (all entries must fit inside a 12" cube. This new build uses similar legs, each built out of 3 Dynamixel AX-12 servos, Bioloid brackets, and SES tubing for the upright leg. The center body and chest are custom aluminum plates.
He has a head similar to some of my previous fire fighting robots. The head has an IR ranger for 99% of his navigation, a sonar ranger mainly for approaching the candle (since the IR gets wiped out), an IR photodiode for fire detection, and a ducted fan for fire extinguishing. Issy is using an arbotiX robocontroller, and power is from an 11.1V 2200mAh LiPO.
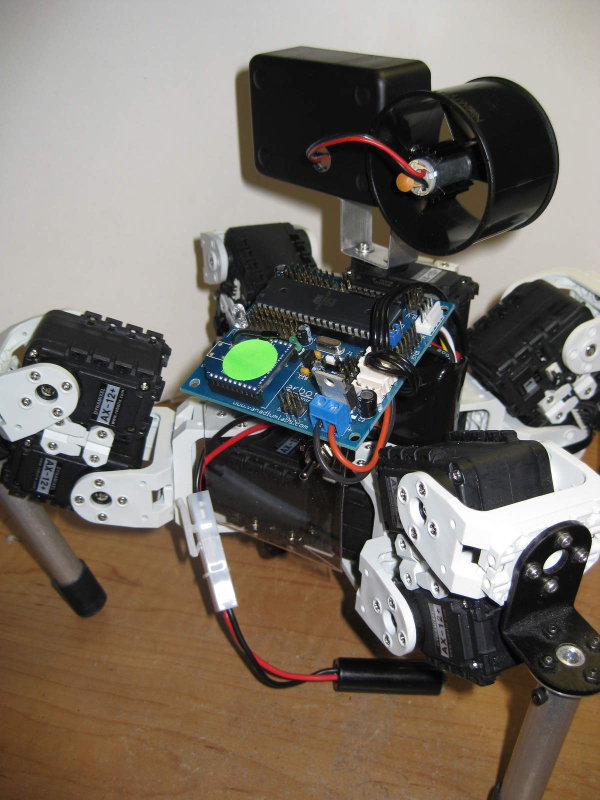
Fire Fighting Robot
- Actuators / output devices: 13 Dynamixel AX-12+ servos, ducted fan
- CPU: ArbotiX Robocontroller
- Power source: 11.1V 2000mAh LiPO
- Sensors / input devices: GP2D12, EZ-3, IR photodiode to detect fire