



IsoBot01
31-Jan-2009
Hi! This is my first robot! I was waiting a week for electronic components to arrive from UK, and then long month to find proper chasis. I found it today! Not working remotely controlled crane on tracks. I have connected motors to Picaxe via motor driver as per "Start here" and tested the chasis, it works. Now my robot can drive in zigzags. Next step - get servo hooked up...
1-Feb-2009
Continuing with construction I used an empty drugs tube to contain SRF05 and hook it on servo.

This was qite easy to do with screews provided with servo from Picaxe servo upgrade pack.
After connecting all wiring project board secured to upper housing of ex-crane :)
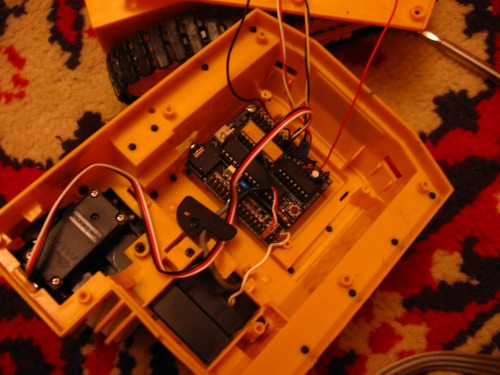
And a hole made to make reprogramming a piece of cake :)

Now it is time to clean out my working environment :)

... and go back to code editor. First is "Start here" robot code updated to use SRF05.
Wow! My first robot is working now!
Next will be improving his navigation skills and... thinking what else he could do apart from avoiding obstacles :)
--------------
5-June-2009
This is my last update on IsoBot. It's got some minor improvements like second power supply, which made him move a bit better and separate switches for both power supplies.


And the lastupgrade was a touch sensor in front of the robot.

This is it!
I set the status of this bot to complete as I'm not planning to do anything else to it. This was my first bot and I really enjoyed building him! But.... it's time to move to my next project which I already recieved some parts for!
PS.
I did not make new video as functionality did not change lot.
Navigate around via ultrasound, avoids obstacles
- Actuators / output devices: noname geared motors
- Control method: autonomous
- CPU: Picaxe 28x1
- Power source: 4 AA cells
- Programming language: Picaxe basic
- Sensors / input devices: SRF005, tactile switch
- Target environment: indoor