


IR eyed Robot
Hello every one
Today I show you my work, from the early beginnings until now (It won't be long).
(I'll try to be respectful of the english Grammar but i'am not sure to succeed).
I have to say that I've started from almost nothing, No skills in Programming, Electronics and Robotics at all.
I only have time to spend, parts and a friend named Google.
So Let's go, Let's make Robots!!!
1/ The first one named U.P.J for "ugly piece of junk"
It was supposed to go forward, bump something then make a left or right and go forward again.
It has also two photo-resistors and should have made turn when a light point on them but it has never worked well due to the bad geometry of the frame.
So I tried to enhance the frame (please stop laughing...) but it was another failure.
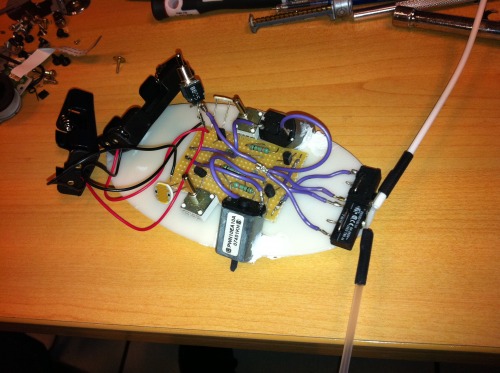
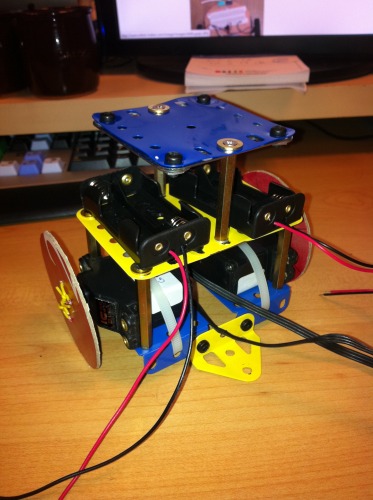
2/ Next step was to create a Meccano base frame.
The result was not very satisfactory. Too High, Too weighty, and the wheels...what can I say for defence? Nothing.
It has two servos that I transform to run continously.
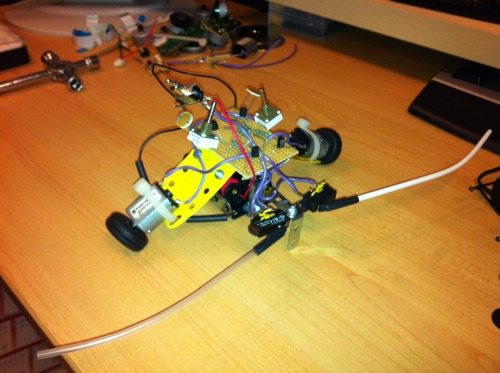
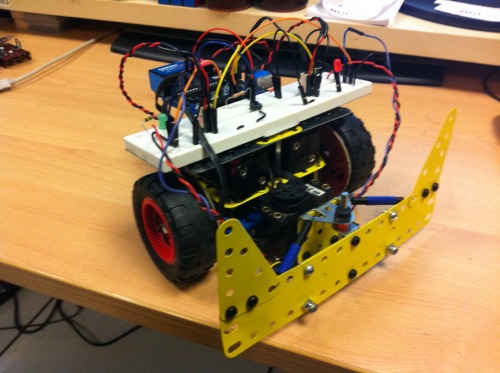
I soldier on and reach this stage.
Big foot, Big bumper, and an Aduino Duemilanove as brain.
It was doing what the bug on top was supposed to. Forward, Bump, Backward, Turn, Forward, Bump....
It has an On/Off switch and LED lightning on turn. I'am now a bit ashamed of it but it was my real bot. My first success.
His name is SWEC for Slow, Weighty, Energy Consumming.
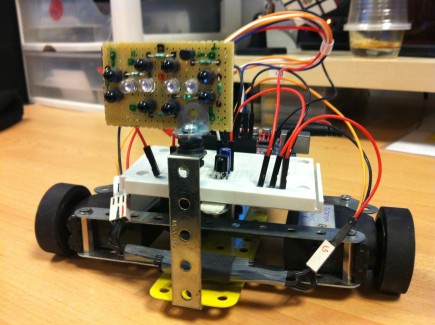
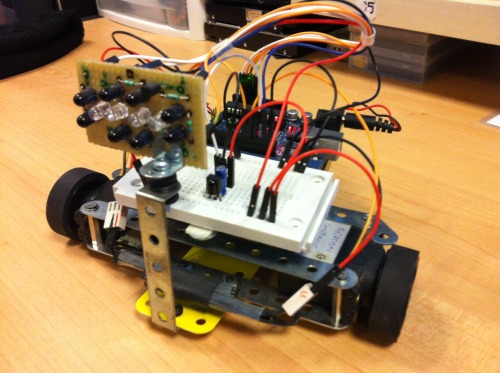
3/ Today
The frame has considerably shrink, the bumper and the big foot has disapeared, tiny wheels from a printer and an IR eye Instead.
It still slow but smarter. It detect and avoid obtacle autonomously.
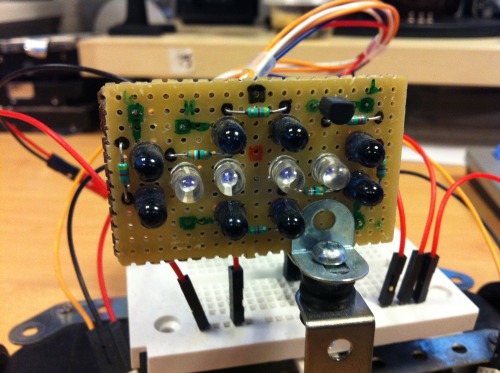
Close-up on the IR eye I've stolen the plan from Oddbot (Eternal Gratefulness, I hope he won't be angry about that)
That's all.
I have now to thank you all because I won't came through this project without you.
I found here, ideas, codes, and a community.
Thank you again.
Navigate around avoiding obstacle via IR eye.
- Actuators / output devices: 2 servos
- Control method: autonomous
- CPU: Arduino Duemilanove
- Power source: 4 x 1.5 and 9V Batteries
- Programming language: Arduino C
- Sensors / input devices: Home made IR eye
- Target environment: indoor flat surfaces