



InterbotiX PhantomX Hexapod
Hey guys,
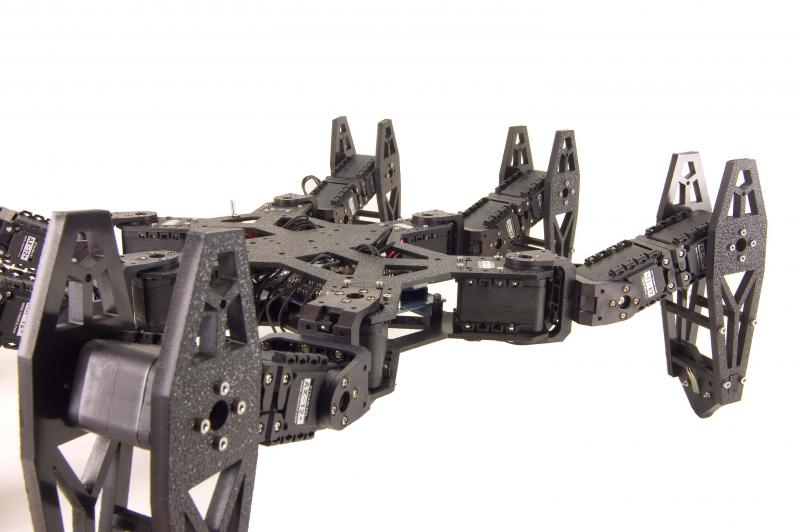
(Full disclosure) I work for Trossen Robotics, and this is a prototype for an upcoming product we're making. But- I think it's a pretty cool bot, so I wanted to show off the prototype. This crawler features 18 AX-12+ Dynamixels, an 11.1v 2100mAh LiPo Batterie, a custom lasercut ABS frame, and ArbotiX Robocontroller w/ Xbee Wireless onboard!
I designed everything in Autodesk Inventor, it's actually pretty simple construction. Two flat pieces make up the torso, and two more flat pieces make up the tibia of each leg. The femurs consist of end to end Dynamixels. There are only 14 custom cut parts for this bot, 12 of which are the same (tibia pieces), the rest of the crawler is built using the stock brackets that come with the servos (but dyed black).
It runs a fully open source IK engine developed by Vanadium Labs, and has tons of I/O available for additional sensors. For now it's just remote controlled, but we're working on autonomous behaviors as well as experimenting with implementing a FitPC2 onboard running ROS. I'd be more than happy to post the code if anyone is interested in seeing it.


Crawls!
- Actuators / output devices: AX-12+ Dynamixel
- Control method: autonomous, remote control
- CPU: ArbotiX Robocontroller, ATMEGA644p
- Power source: 11.1v 2100mAh LiPo
- Programming language: C
- Target environment: indoors/outdoors/small areas