


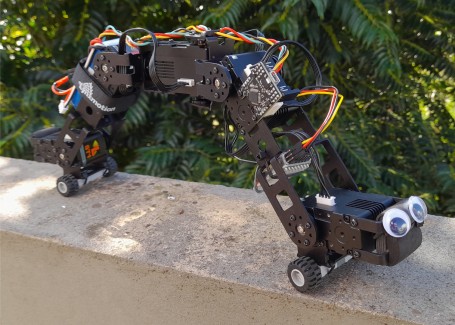
Inchworm-inspired robot
Why build this?
Inchworms are not only very cute, but they also have a very fascinating way of getting around. If you've never really seen how they move, please watch this video: https://www.youtube.com/watch?v=rcIbT6F0U1w
I'm very interested in different mechanisms... and different ways of locomotion, so I decided to try my version of an inchworm, especially because of its peculiar way of locomotion.
The build
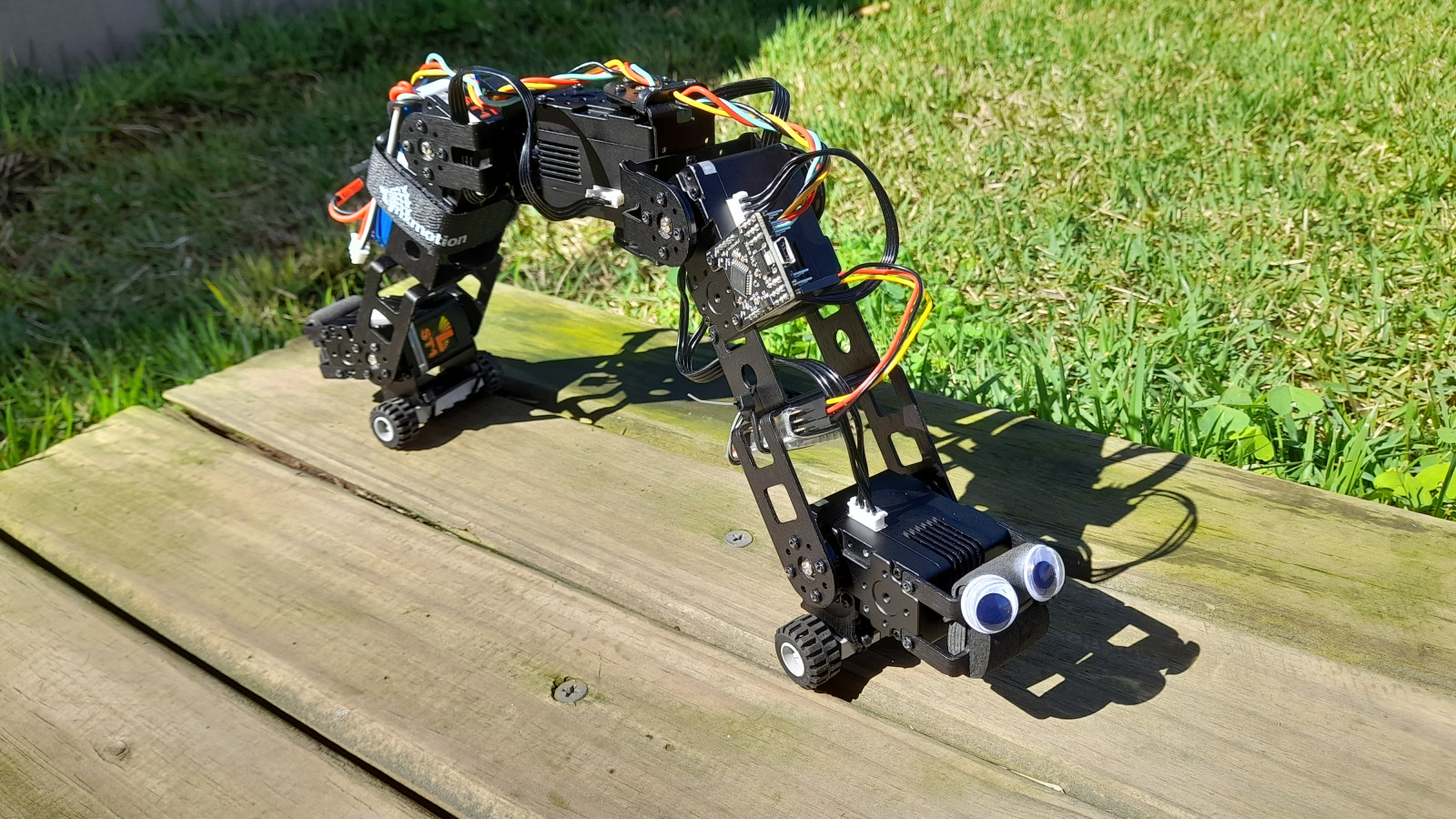
The mechanical part is based on Lynxmotion Smart Servos. I used five LSS ST1 and brackets from the Servo Erector Set V2.
I've also used LEGO wheels that are used for locomotion when it's convenient to eliminate friction, and EVA foam on both ends for a soft touch to the ground when friction is useful.

Electronics
A Lynxmotion LSS 2IO Arduino Compatible Board was the brain chosen, not only because it fully interfaces with the smart servos, but also because of its very small size which was very convenient for this very compact project. In addition, the small board still has 3 digital and 3 analog pins, and I used only 1 analog pin to connect the RadioLink RC remote controller receiver.
To power the robot, I used a 2s 7.4V 1000mAh Lipo battery. As the servo motors have a voltage range of 6 to 12.6V, and also as the project is very small and doesn't need the whole torque of the servo motors, the 7.4V was fine. In addition, the size of the battery also matched the width of the brackets where it is attached.
The gait
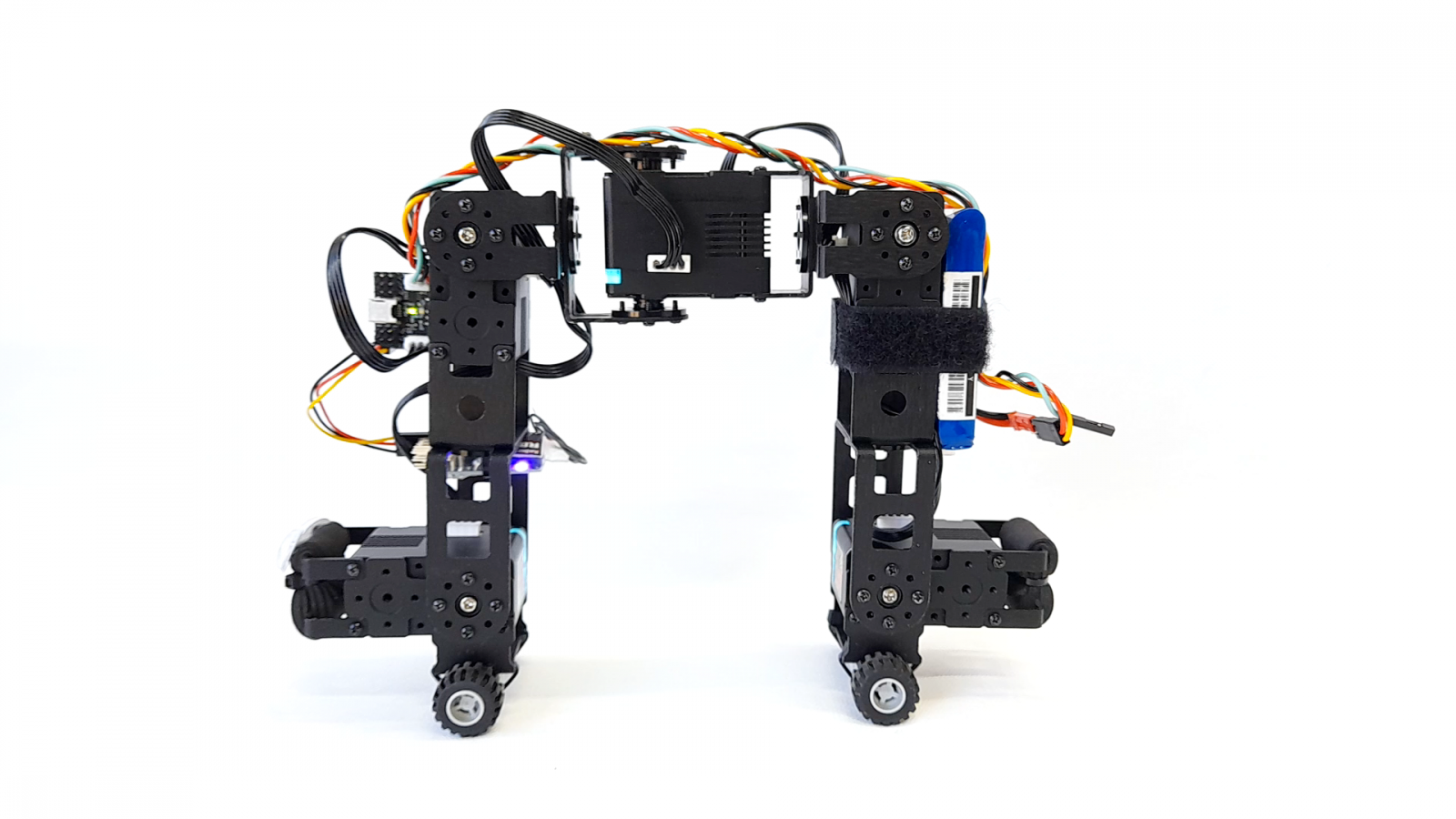
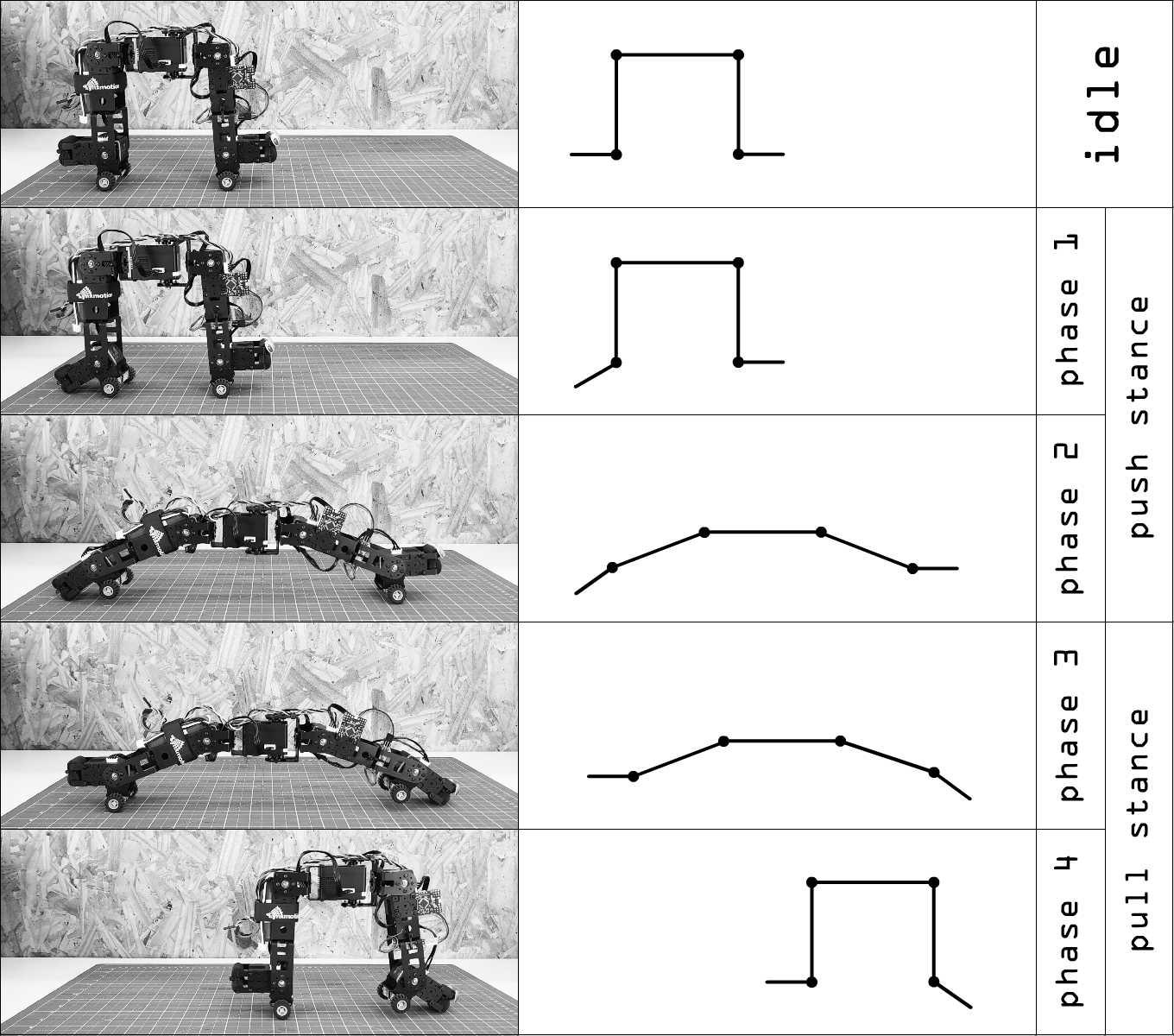
The real inchworm has three pairs of front legs that help it "walk" in the movement I call the "push stance", and two pairs of hind legs (actually called prolegs) which are basically "dragged" in the movement I call the "pull stance".
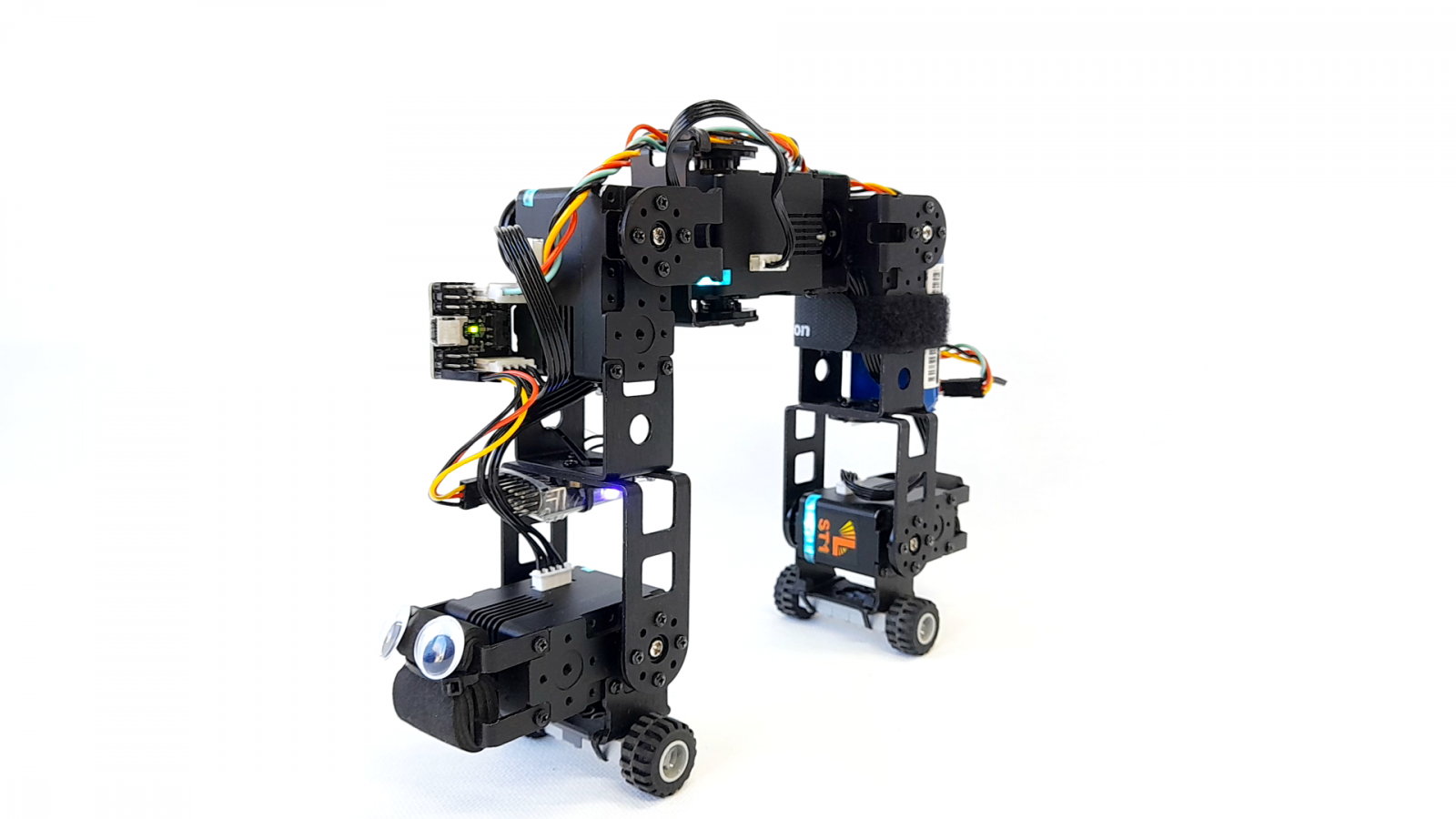
In my approach, I didn't reproduce all the legs that the inchworm has, as that would greatly increase the size of the project. Instead, I just tried to reproduce its main and most characteristic movement, which is the bend of its body. The gait I developed is divided into four phases, and each phase has its “target positions” represented in the image below.
Conclusion
The wheeled approach feels like a cheat considering we're talking about an animal with legs, and they really made it easier by eliminating friction with the ground. But I'm thinking of building a version without the wheels, which will probably add to the difficulty quite a bit as half the body will have to be lifted off the ground and that ends up being quite difficult to balance.
Overall it was a really fun project... also a fun way to learn a little more about this very interesting insect, and an instant hit with the kids at home. :)