


i shall call him.......?????....... hopeless!!!!!!!!!
this is my first time posting a robot. i've build 4 robots in my past. this is another project for me to learn more about writing in code. its all practice and preperation for my never ending project. a autonomous octopod. so fell free to tell me if im doing somethn wrong or if there is a better way to going about it. all coments good and bad are welcomed.. just need a few outside openions.i basically built a mintduino and put it on a pcb. im using two 9v batteries. one for the brains and sensors, and one for motors and servoes. i dont know the actual cost of build due to the fact that 85% of the stuff i already had. NOTE: the high and lows used for the continuous servoes are based on what works for my modified servoes. you may have to play around with numbers a bit to figure it out for your servoes. center and sweep are for standard servoes. i decited to redo my motor/ servo drive unit. i can now run 9v for my motors and 5v for my servoes on the same little shield using the same battery. will post pics of the new MDU later on.
im having trouble with it programming, so im going to double check everything. but its been on hold due to all the snow we have been getting.
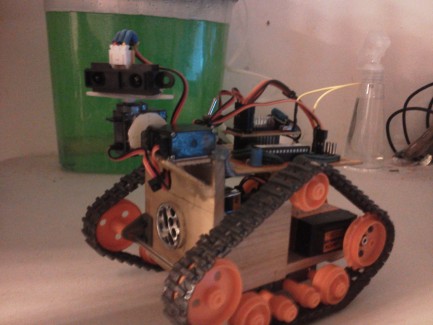
navigate around with IR
- Actuators / output devices: Tamiya bulldozer frame and tracks
- Control method: undefined
- CPU: Atmel ATMega32
- Power source: 2x 9V
- Programming language: Arduino C
- Sensors / input devices: Sharp GP2Y0A21YK0F IR sensor
- Target environment: indoors mainly