


Hybred Boe Bot
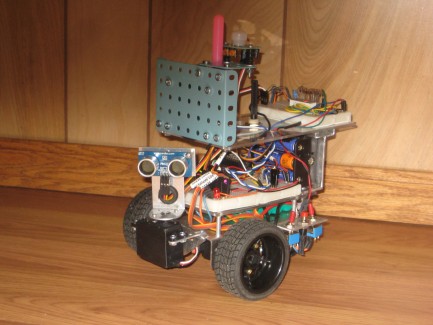
This is my latest creation. It is a Hybred Boe Bot built up from a scratch on a a Boe Bot body. . It has 2 power supplys, one for motors and one for electronics so far. I plan on adding another battery pack just for the microcontroller. I wanted to make a highly expandable bot as small as possable without drilling holes ( except for the lexan platforms). It can handle any processor, but currently using the Parallax BS2PE. So far so good. It is getting heavy so better wheels may be needed, It dosen't stop and turn on a dime anymore. as you can see in the PING demo video.. Here are some new additions I reciently made. Added a speaker and transistor to make it louder and upgradded the wheels. Wheels do make a big difference.
Expandable, roam ultrasonic and or IR
- Actuators / output devices: Two servos modified for continuous rotation
- Control method: Autonomous and IR remote. Optional serial input for Xbee
- CPU: BS2PE stamp for now
- Operating system: windows XP
- Power source: 6 AA batteries for motors, 7.2V NiMH for electronics
- Programming language: pbasic
- Sensors / input devices: Parralax Ultrasonic Sensor
- Target environment: indoors mainly