


Humphrey - my start here bot
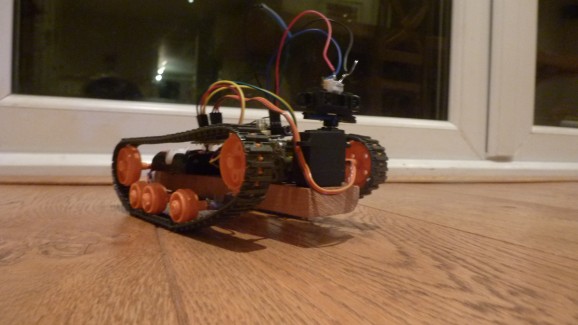
This is humphrey the tempremental robot.
he is my variation of the start here robot (why do i refere to it as he) basicly the sme but with tracks and an ausome rocker switch,which is so fun to press - yeah i am pretty sad.
unfortunately he can only go up stuff that is lower than his wooden body unlike i hoped :(.
 .
.
yay i have now programmed it and given it a top hat, it goes well with the name humphrey
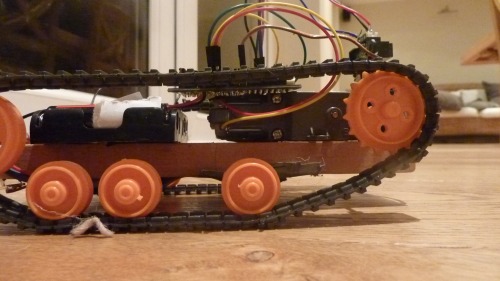
the question is now what to do next. i think i'm going to move around the wheel layout and make the robot less 'fally aparty'
but then i think i'm going to do some form of motion tracking or a grabber.
sorry didn't mean to call it my first project, i just used imovie on mac and that was the default name.
avoids walls
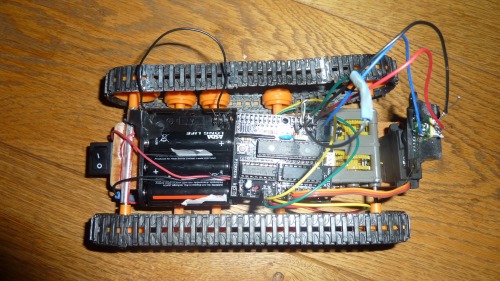
- Actuators / output devices: 2 * 1:120 ratio Tamiya gears
- CPU: Picaxe 28x1
- Programming language: Picaxe basic
- Sensors / input devices: Sharp IR
- Target environment: Indoors - Carpet