


Humanoid robot torso
Update 2/4/2012
I've been doing a lot on this project but haven't really got round to updating this page, sorry about that. I've added a second arm and a gripper. I've also been experimenting with carbon fibre for arm sections and using different size servos for the elbow joints. As it stands its time for a full rebuild of the robot so its going to be in bits very soon, sad I know :( I'm starting work on an improved humanoid torso. Much the same design but built smaller and to a higher standard. I've started a blog on the progress of the new humanoid robot at www.bigfacerobotics.com which I'm going to try and update as often as possible.
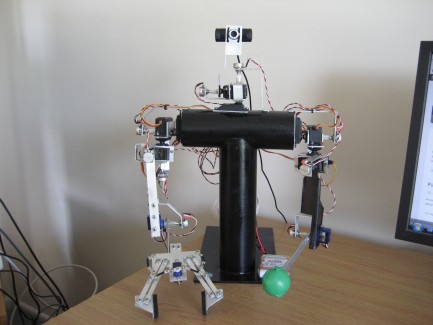
Hi Everyone, This is my latest robot project, a humanoid robot torso. It has servo motors for actuation and each servo has an associated potentiometer for position feedback. Servo positions are controlled using the external potentiometers for feedback and a pid controller. It is also equipped with a webcam 'eye'. I have written a custom controller running on the pc to allow servo positions to be controlled manually. I've also implemented some autonomous behaviour in the form of object tracking using the webcam and OpenCV. OpenCV is used to identify and locate the position of the hand in the field of view and the controller running on the pc sends commands to the Arduino mega to move the head to keep the object centred in the view. Check out the second video to see this in action. As the arm is moved the head will move to track the position of the hand.
- Actuators / output devices: Servos
- Control method: Semi-autonomous
- CPU: Arduino Mega
- Power source: 6V
- Programming language: C++
- Sensors / input devices: potentiometers
- Target environment: indoor