How to make world's smallest line follower robot (robo Rizeh)
How to make world's smallest line follower robot (vibrobot)
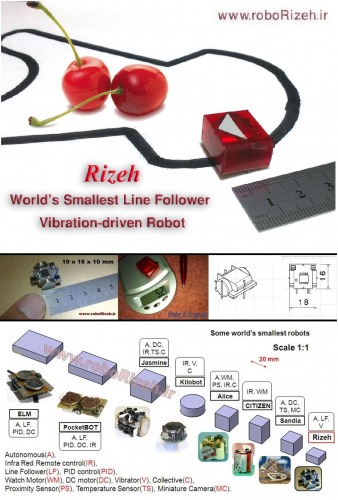
"roboRizeh"
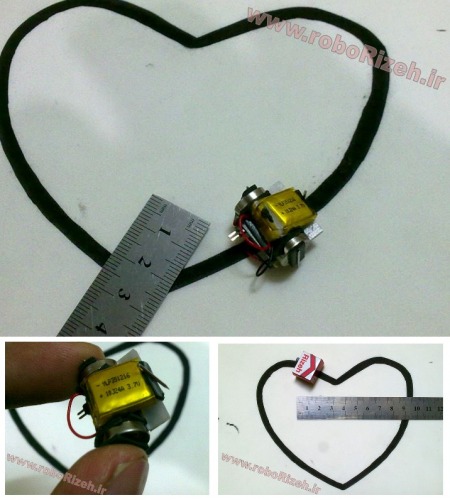
weight: 5gr size: 19x16x10 mm
by: Naghi Sotoudeh
www.roborizeh.ir
The word "Rizeh" is a Persian word that means "tiny". Rizeh is a vibration based very small robot. It is driven by two vibrators of cell phones. This makes the robot very low cost to build and implement. The robot is able to perform linear and circular motions as two basic motions in mobile robots. Control mechanism of the robot employs internal PWM of micro-controller to control vibrators. Some techniques are applied to minimize electronic control board of the robot which is a very crucial in building up a small robot. As a standard task in mobile robots, line following task is selected to test Rizeh..
Read full released previous version of this robot at Hizook.com (2011)
Steps:
1. Preparation components
2. PCB
3. Programming the microcontroller
4. Soldering the components
5. Mount vibrators and stands
6. Draw a course
7. How to run and test
* HEX and PCB and Source CODE files attached.
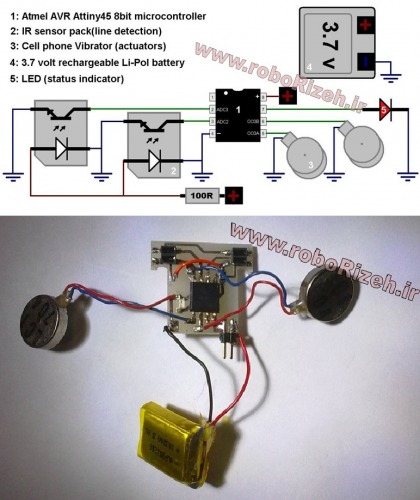
+ List of components:
-1 x MCU: ATtiny45 microcontroller
-2 x IR sensor pack GP2S04
-1 x SMD LED (size=805)
-1 x R=100 ohm (size=805)
-2 x 3_Volt cell phone coin-vibrator D10mm W2mm
-1 x 3.6 volt Lit-Pol battery(Bluetooth hands free battery)
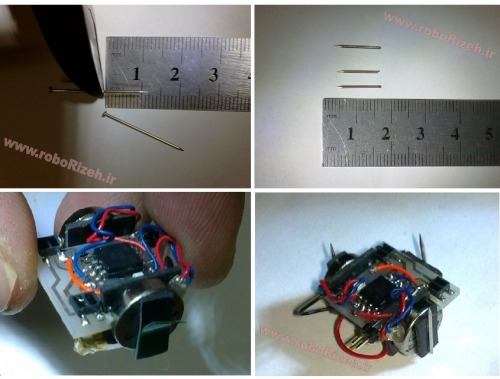
-2 x Small size pin-header(male and female)

Soldering all components (attention to wire colors and polarity and jump wire):
Mount the vibrators and stands and battery:
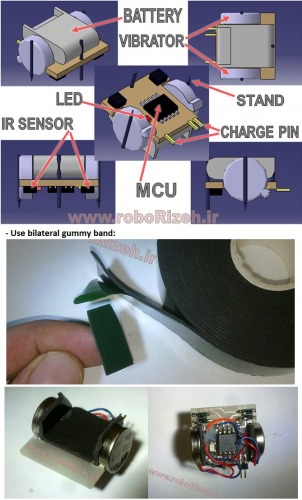
Cut 3 needle for robot stands (left & right= 12mm front=13mm):
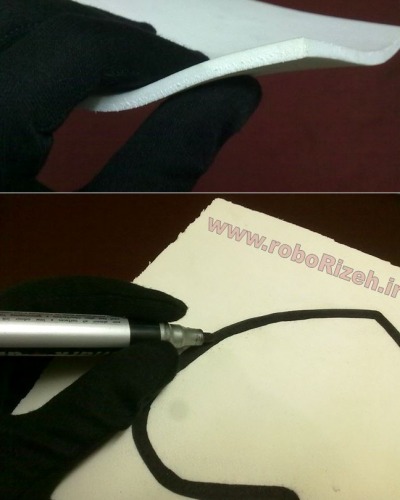
At over of a soft surface draw a course with 6mm width:
RUN and TEST: After place power connector please wait 5 second (for sensors calibration). Then place robot on course:
1.The Robo_ RIZEH full paper article published in ADVANCED ROBOTICS journal:
“Design and motion analysis of vibration-driven small robot Rizeh”
2.Robo_RIZEH get first place at RoboCup IRANOPEN2013 in Demo league (free style league)
3.For more information and video please visit the robot website : www.roborizeh.ir
4.Special thanks to Prof. Adel Akbarimajd my partner in this project.