


Horus Lambda
Competition video added, some other nice bots in it as well:)
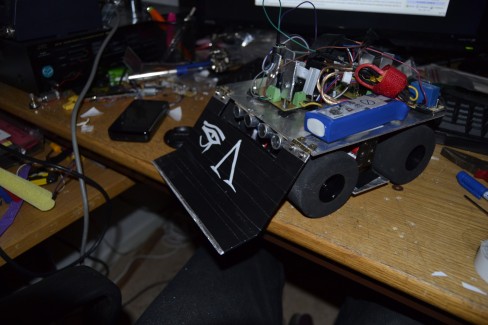
This is my 3kg sumo robot for this years Robot SM(the swedish national championship in robotics).
It's driven by four Lynxmotion GHM03 motors with Lynxmotion TSR04 tires on the axles.
It will be controlled by an Arduino Mega 2560, which I'm going to program with plain old C. I will not have time to write libraries for the HC-SR04s in C, Wiring it is! :)
It sees the world via four SR-04 Ultrasonic sensors; one in the front, one on each side and one in the back. It also has got four TCR5000-based linedetectors with controllable gain pullup-resistors.
The H-bridge is my own design and based on TIP147/TIP142s. It can handle about 10A per channel and about a 100V(yes seriously).
Got the name from this: http://www.seventhsanctum.com/generate.php?Genname=mechaname
The mechanics is mostly finished, the linesensors are finished and tested. Haven't found a way to mount the HC-SR04s cleverly yet
Linesensor closeup(lots and lots of hot glue there :D)
Update 2012-03-29
Mounted the magnets, the PSU(which I managed to short, need to replace the LM7805) and the ultrasound sensors, images below:
Magnets:
The hardware is mostly done. I've added a video of it battling it out with a bottle of water. The code needs some adjustments for 100% speed as you can tell by the video :)
Pushes other robots out of the dohjo
- Actuators / output devices: 4x Lynxmotion GHM03 motors
- Control method: autonomous
- CPU: ATmel AVR ATmega 2560
- Power source: 3S 2800mAh LiPo Battery
- Programming language: C
- Sensors / input devices: 4x SR-04, 4x TCRT5000-based line detectors
- Target environment: Sumo Dohjo