



Hormes all terrain robot
This is not a cat toy.
My first personal robot after being involved in the FIRST Robotics Competition since 2006, an outdoor robot named Hormes, after the Greek spirit of setting oneself into motion. It has an all steel frame, an arduino for a brain, listens to a regular xbox controller, and runs on 12 volts and over most terrain. Current weight is 52.5 pounds / 23.8 kilos.
Top speed is around 10mph, determined by opening a gps speedometer app on my phone, setting the phone on the robot, and driving about 100 yards flat out.
The controls suite has an arduino uno with a usb host shield so it can listen to the usb xbox radio reciever. The motor controllers are Talons from Crosstheroad electronics. Each motor has a 20 amp auto-resetting circuit breaker on a surplus power distribution board from the FRC. A 10 amp hour 12 volt battery supplies the power for a short run time, but that can be upgraded. I've added temporary headlights in the form of LED flashlights ziptied to the front corners of the frame, but eventually I want to have them remotely switched.
The frame is 1 inch sqaure steel tube with holes predrilled every inch with custom corner brackets made from 3" x 1/8" steel stock. U-bolts hold the 5/8" steel axles to the frame.

A pair of 2.5" diameter CIMs make it go, each going to an AndyMark CIMple box with a tandem sprocket on the output shaft. All four 10" wheels are driven with #35 roller chain.
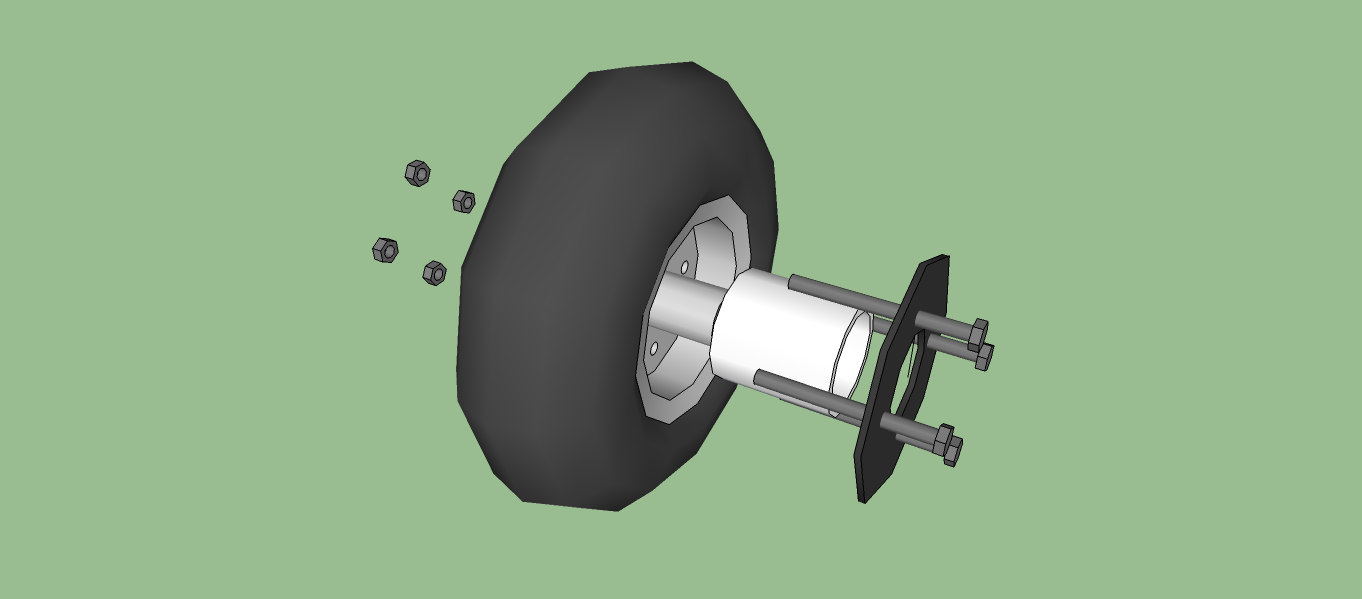
Northern Tool sells sprockets with a hole pattern that matches many of the wheels they have, which is what made this project possible. These are 10" tubed pneumatic wheels with two part hubs. To attach the sprockets, I cut 2"dia PVC spacers and got bolts long enough to hold it all together with nylock nuts.
The next improvements I have planned are to contain the electronics, and add a roll cage and headlights. Further down the pipeline are at least one camera, a radio with a much greater range, and some kind of manipulator.
A few things that have been suggested I won't be adding are a flamethrower, machine gun, and the ability to fly. At least on this robot, no promises on what's next.
This is also my first post on here, so I'm not sure how much detail to go into. Video and better pictures to come.
drive, torment neighborhood dogs
- Actuators / output devices: CIMs
- Control method: xbox controller
- CPU: Arduino
- Power source: 12V 10ha SLA
- Target environment: outdoor, rough terrain