


Hopper
11/16/17 9:57 PM
Hi everyone. So I looked at Hopper’s legs again, and realized that both legs were on the same poles- both legs could only move to the same place at the same time. Despite this being a fairly easy fix, I have still decided that it is time for Hopper to be retired. I feel ready to move on to a better robot- one that has a different chassis and design that my heart will be set on. See you again on my next robot!
———————————————————
11/08/17 9:51 PM
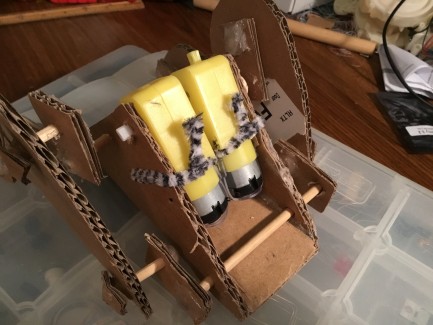
I have recently taken two motors, removed one shaft from them both (and hopefully kept them both functional using gears from RoboRaptor’s former “replacement” motors,) and “mounted” them to the robot.
This is the beginning of an improved Hopper (which will also eventually gain a new, “proper” name, given how much more this project has become to me). Thank you all for your continued support, and I hope to keep working on this robot. See you later- time to wind down.
———————————————————
Yes, it’s me again. But this time, I have a new robot to show for all my postings!
This is Hopper. As the name implies, the robot propels itself forward with both its “legs” in a “legs-over-body” type movement, slowly but surely. The attached pictures show the chassis’ creation.
Building this robot was a bumpy but fun ride. I based this robot on a “robot frog” tutorial on Bright Lifes’ YouTube channel.
I originally used a regular motor, a rubber band and a cardboard pulley like in the video to make the robot move, but the motor ended up being too fast with not enough torque to make the robot move (how on Earth Bright Lifes made it work, with a 9V battery no less, is beyond me). I finally settled on cutting the top pole so that a much stronger gear motor could be attached to them.
To do that, I used a pipe cleaner with hot glue to attach one motor shaft to the inner pole, and used a small, hot-glued wooden spool (yes, you read that correctly) to connect the shaft and pole on the outer side. I also used more pipe cleaner to attach the motor to the chassis.
Finally, I connected the gear motor to a 4x AA battery holder, and at last Hopper began to do its thing. I will say though that the battery holder cannot be placed in the chassis due to both limited space and because it makes the robot too heavy to move.
That’s all for now, and thank you for reading!
Moves forward by “hopping”
- Control method: none
- CPU: none yet
- Operating system: none
- Programming language: none yet
- Sensors / input devices: none so far
- Target environment: indoor