


HOG Drive System aka Hemispherical Omnidirectional Gimballed Drive System
All my projects & progress are available at marginallyclever.com.
about
They were first researched in 1938. Curtis Boirum built one that got on Hackaday. Now I bring you the plans for a model that you can print and build yourself. Use one to make an awesome RC car. Use two to make an RC car that can move in any direction. This system has about 15 degrees of movement on either axis.
Instructions
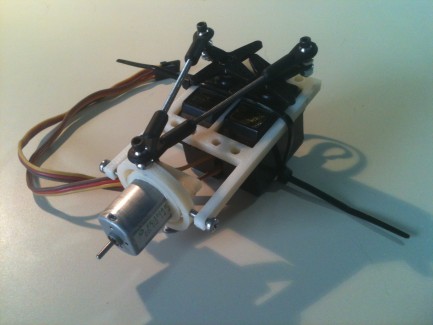
Long way: Get the designs from thingiverse and 3D print a copy. Drill out the missing holes Add - two hobby servos - one Tamiya 70171 kit (cut to size) - a pair of single-arm servo horns (or amputate a double arm) - 3 10mm M3s - a pair of zip ties - a 5v0.2a DC motor
Short way: Get the parts in a kit from marginallyclever.com. Assemble as in the pictures.
Expect to file a bit because it's a very tight fit. I haven't found a good way to attach the hemisphere, please comment with your thoughts.
Final thoughts
You'll need two free-spinning wheels to make a triangular base and allow the HOG drive to move about.
I'm using one to make a line-following robot. The body of the vehicle will be made from folded cardboard with a pair of free-spinning wheels on the back. I'm using QRD1114 IR sensors for the line detection and an Arduino to be the controller.
Moves a vehicle forward, back, left, and right; teaches about gimbals
- Actuators / output devices: 5v DC motor
- Control method: PWM control to the servos; 5v to the DC motor.
- Power source: 5v1a power supply.
- Target environment: smooth flat surfaces