



HexPi - A RoboPi + Raspberry Pi based hexapod robot
My first hexapod build!
I've been itching to build one for a long time now, but the cost of the very nice Lynxmotion kit was out of my toy budget.
After scouring Ebay, I found an inexpensive chassis (search for "hexapod" on Ebay), and inexpensive - yet reasonably high torque servos (Tower Pro MG995, they get poor reviews, but are inexpensive, and not as bad as some reviews make them out to be).
You can find my full build log with a lot more details at:
http://www.mikronauts.com/robot-zoo/hexpi-hexapod-pi-robot/
This is a mini-version right here on Let's Make Robots.
May 30, 2014
I think I have the servo jitter under control, I am working on running multiple legs at once with my servo tester. Stay tuned!
Here are a couple of shots to whet your appetite:

(HexPi chassis complete, "shoulders/hips" calibrated)
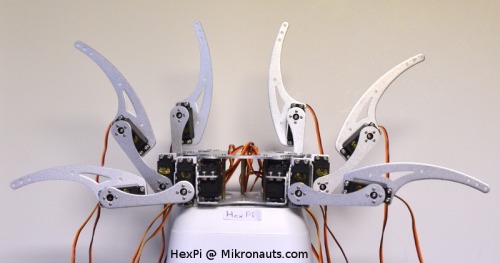
(HexPi showing off his attached, calibrated legs)
I'll add photos at major milestones here, more details in the build log at the link above.
My next task is to set up the motor and RoboPi power systems, add a RoboPi, set up all the servos on it, and start working on gaits... then inverse kinematics.
June 11, 2014
Added a video to my build log, showing HexPi wiggling his legs. It also unforunately demonstrates the jitter issue with the TowerPro MG-995 servos.
June 18, 2014
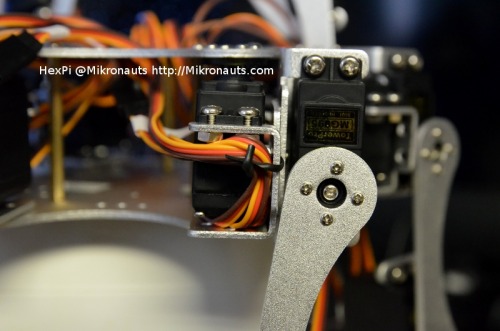
HexPi got three pairs of new shoes!!!
Ok, the real update is that I added 50cm servo extension cables to better be able to test HexPi's legs, and while at it I cleaned up the wiring.
More photos and build details in the full build log:
http://www.mikronauts.com/robot-zoo/hexpi-hexapod-pi-robot/
I'd love to hear about your experiences building hexapods!
Links:
https://www.robotshop.com/letsmakerobots/robopi-most-powerful-robot-controller-raspberry-pi-adds-8-core-co-processor
http://www.mikronauts.com/raspberry-pi/robopi/
http://www.ebay.com/itm/Arduino-Aluminium-Hexapod-Spider-Six-3DOF-Legs-Robot-Frame-Kit-ge-/251195993457
http://www.ebay.com/itm/MG995-High-Speed-Digital-Metal-Gear-2BB-Torque-RC-for-Servo-HPI-Savage-XL-FUTABA-/310700893798