



Hexapod of the second world war!
Sorry if I hurt posted. this is my first post, and I'm not very good in English :)
My very first robot.... I know it's… a just toy, it's a real stupid, to begin on robotics it’s not the thing with which to start, It is more an artistic thing rather than robotics.
It’s because I am there where there is anything for creating robots, we have just simple electronic components
Ps : This country is Algeria and I suffer…..lol
Well, I was 17 years I was a little naive and I just started, I have other more interesting creation : )… I'll post after
Problems:

0 - My géographique location lol
1 - How to tip the robot on each side with small motors (and without gear wheel to increase power because the use of gear wheel is very complicated and needs to be precise).
2 - Rotate the motor in both directions (I haven’t found a "L298")
Solutions:
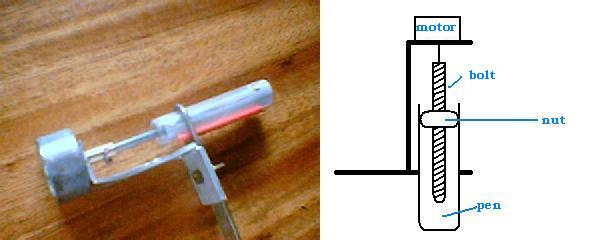
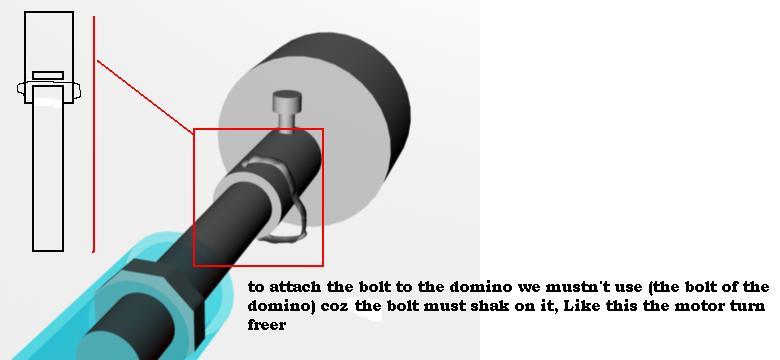
1 - On turning a bolt that moves the paw (a pen cut in half) in this way we can push heavy things with low power (very effective).
2 - Use 3 relays + buttons that we found in mouse (KLIK KLIK!) At strategic points.
Materials used:
- aluminum.
- There is no micro processor because at that time I did not know programmed it ! juste 3 relays
- 4 motors was recovering like this ---->

How does it walke :
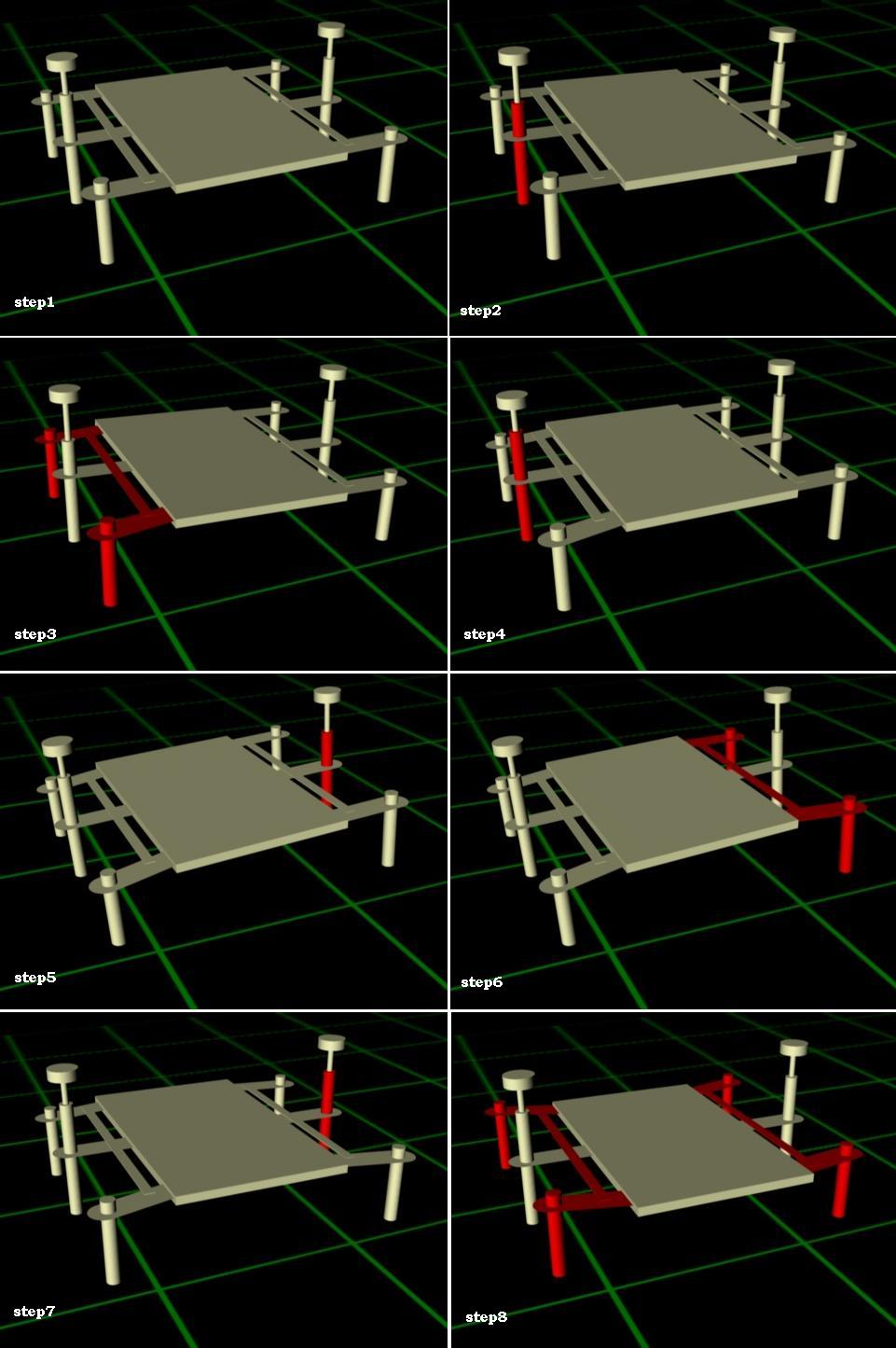
For the circuit that controls the robot .... 3 years are past! I don't remember, it is complicated, all I can say is that it's full of wire that connects the relay and the mouse button to allow the robot to walk.
how dose the middle leg made:
Nb: for stop the leg you must use a button because if the leg go up it well be blocked, and the motor can’t return 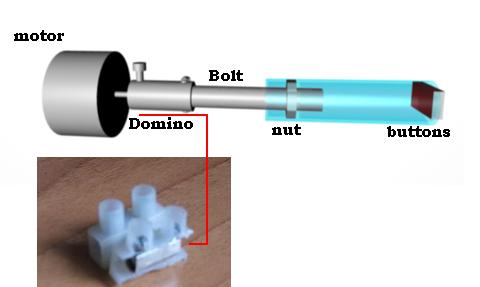
just walk
- Power source: 12v
- Target environment: on a flat surface