


Hexapod 001
For my 2nd project i will be making a 6 legged robot that can move in all directions (fingers crossed) like Steg ill be making it from the ground up and prob get a few grey hairs!
<< Goals >>
- Build a walker using tripod gate motion
- Able to move in all directions Control by remote > r/c
- Gain more hands on xp for bigger complex projects
- Able for wet/dry and rough/smooth terrain
 Leg layout and frame design
Leg layout and frame design
having the gears to tight seems to cause too much friction and too loose adds the danger of gear slips. This way worked just nicely for me.
It also allowed me to work out which directions the gears would move so that i could make sure all legs move in the right way and not lock up, a chain and sprocket method would have been ideal here but i went with the cheeper choice.
 Glued in with super glue and then reinforced with thick over night drying glue, weights added down to give a better bond.
Glued in with super glue and then reinforced with thick over night drying glue, weights added down to give a better bond.
These parts will make up the 2 main side walls of robots frame allowing the gear chain to be connected to the gearboxes.
Main robot frame
Made from bolster wood and match sticks to keep the weight down as much as possible

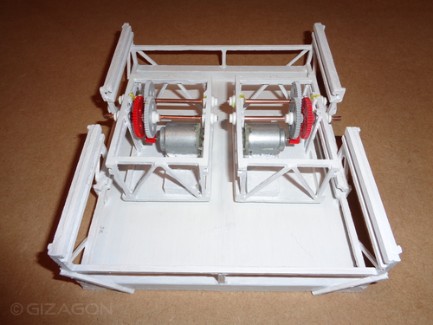
Gearboxes
My 2 homemade 3v gearboxes, primed and greased!


Leg cranks
Decided to again make the cranks myself, it worked out better as the retainers were able to be more secure and fit in snug. Took my time on these as they need to be very secure, used matchsticks and a combo or fast and slow dry glow with clamps.


2 made for each leg, so 12 made in total, retainers glued in placed for a solid rotation.
walks/runs in all directions, r/c control
- Control method: Radio controlled
- Power source: 4 AA batteries
- Target environment: indoor and outdoor