



Hexapod
This was the first robot I ever built. Its based on the design in the book Insectronics by Karl Williams. The body is made from aluminium and it uses 3 servos to move six legs, in such a way that 3 legs are always in contact with the ground. I used a pic for this robot programmed in assembly. It has whisker sensors on the front to detect when its bumped into something. Not very high tech but it was a starting point! Unfortunately i havent got any video of this robot in action and its now been robbed for parts, but i thought i would share a picture or two :)
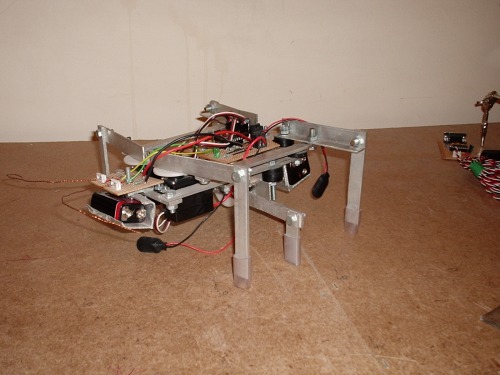
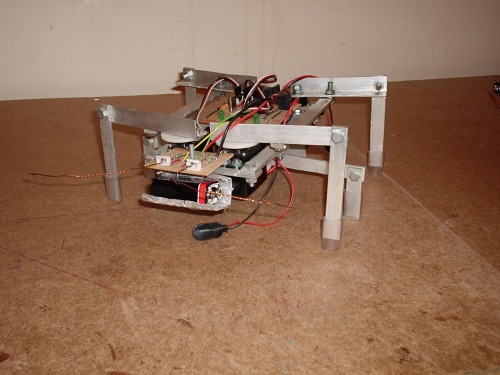
Walks, avoids obstacles
- Actuators / output devices: 3 servos
- Control method: Autonomous.
- CPU: Pic
- Power source: 9V+6V
- Programming language: Assembly
- Sensors / input devices: Whiskers
- Target environment: indoor