


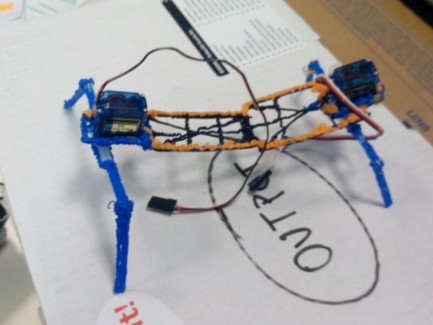
Hand drawn 2 servo four legged insect-like robot
i found inspiration for this robot from this instructables: http://www.instructables.com/id/simpleWalker-4-legged-2-servo-walking-robot/ The legs and the body of the robot were literally drawn with a 3d pen with ABS in about 30min, to test out how much robust was the structure before modeling and printing it.
As i get more filament i may post a full how to about how i drawn it.
First i drawn 2 rectangles as the body sections, soldered them with the pen at about a 195° angle.
Then i soldered the servos directly to the body.
The legs were drawn upside down with three parallel and joined lines of extruded plastic, and then joined with the angled part of the legs at 120° angle.
Legs were measured with a caliper to assure that left and right leg are of the same dimension.
Excess plastic was cut and filed away.
The build works and supports small weights, it's really springy.
As in the instructable the code is nearly the same. Here the code: https://github.com/ValerioCietto/Workshop-Pininfarina/blob/master/TwoServoRobot.ino In the setup it sends servos to home, so that you can check the legs are aligned properly. Then it proceeds going forward at the full speed allowed from the servos.
The walk can be optimized with rubber feets or better parameters, i'll try later.