


GPS/ Autonomous Robot
Hello LMR,
This is one of my robots that I have been working on for a while. I have'nt posted it yet because I wanted to make sure I have a lot done. I use the lynxmotion A4WD1 as the base.
I want to update you on my latest robot, I am using the lynxmotion A4WD1 as a base and an arduino microcontroller. Inside the robot I have a sabertooth 2x12 motor controller and two 7.2 nimh batteries. I also soldered my own perf board together with two sensors, EM-406A gps and the DHT11 temperature/ humidity sensor. Also on the perf board I soldered some headers to connect servos. I just bought HMC6352 compass module and plan on soldering that in soon. On top of the robot I have a netbook running Ubuntu and installed arduino ide and processing ide. I ssh from my macbook pro into the netbook to update the code. I am working on the arduino code hoping to make the robot be able to go to certain gps coordinates. I attached some photos of the robot.
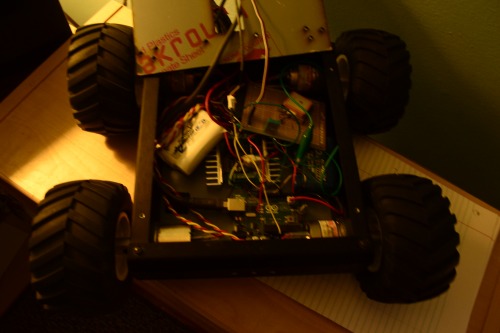
Here is the picture of the electronics from GPS Robot. As you can see I have an arduino uno, sabertooth 2x12 motor controller, my own perf board and two battiers, one for back up.
Update 12-24-12 ----------------------------------------------------------------------------------------------------------------------------------------------------------------------
With great help from markcra I have complete control over my rover through processing. The arduino is running the Standard Firmata sketch and the processing is running code that takes keyboard information and translates it into motor commands. Here is a picture of the Control pannel. Also I added a second base to my rover in order to have a place for my netbook. Im running into some issues with the serial communications between arduino and processing but hopefully I can work it out soon.

GPS Waypoints, Autonomous navigation
- Control method: auntonomous
- Operating system: Linux, Ubuntu
- Power source: 12v Nimh battery
- Sensors / input devices: Parallax Ultra Sound, EM-406A gps, DHT11 temperature/ humidity sensor, HMC6352 compass
- Target environment: outdoor