


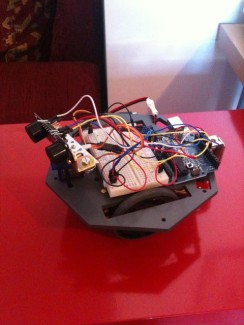
Geronimo - Simple robot that navigates around
My first robot is “Geronimo” and it is a simple autonomous robot with an ultrasonic sensor for obstacles avoindance.
This robot can be built by a newbie of robotics.
The robot, very basic and simple, goes straight and verifies if there are obstacles. If it found some obstacle, it turns the ‘head’ and sees at the right and at the left in order to verify where the street is more free. Then it goes where the street is more free. Nothing of special, but it was my first robot!
Navigate around with ultrasound
- Actuators / output devices: Continuous rotation servo
- CPU: Arduino Duemilanove
- Power source: 6x1, 2=7, 2V and 9V for Arduino
- Programming language: C++
- Sensors / input devices: URM 37 Ultrasonic sensor
- Target environment: indoor flat surfaces