


Generic 2WD Rover
Its a Generic 2WD Rover!
EVERYONE who plays with robots wants to make a "lunar rover" surely?
This is my first rover
having had NO joy getting my Lego to play with my Motorshield (low powered motors couldnt overcome the friction created by the gearbox (created out of lego) required to reduce the speed/increase the torque to make it useful.
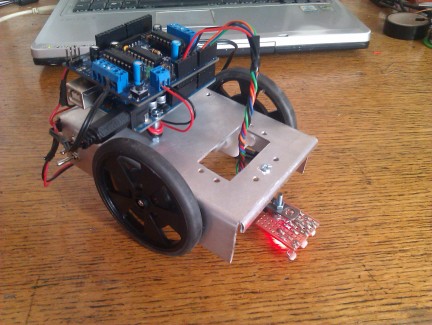
V2 involved getting on technobotsonline.com/ and picking up some generic motors (with gearboxes) & wheels.
The chassis is constructed from bent aluminium, and was made by use of a paper template, a dremel, and a hacksaw. subsequently its not the tidiest in the world, and it went through many versions, but it works!
its held together with machine screws and a bit of double sided sticky foam as vibration damping for the motors
first it was a line follower (nice and simple):
a some what unstable line follower:
which had all of its issues solved with a battery rearrangement and the addition of a high tech, multi directional trailing jockey skid:
programming wise, once turned on (switches at the back, one for motors, one for the arduino, which allows me to run test programs without it running off the table)
it spins on the spot to calibrate the sensors, then waits for a button press (mounted on the green indicator lights board) before toddling off along the line. If it hits all black over the three sensors for more than 1 second. It stops and ends the program. This way, the "finish" is a solid black box at the end of the line.
Next for G2WDR, Maze Solving!
- Actuators / output devices: 2 geared motors
- Control method: autonomous
- CPU: arduino uno
- Power source: 4 AA batteries, 9V for logic
- Programming language: Arduino C++
- Target environment: Desktop or floor