



GajdoBot - universal competiton SHR (line follower, sumo robot, obstacle avoider)
This is my first robot.
My goal was to learn a bit about electronics, robots programming and implementing simple algorithms in code. I've tried to build universal competiton robot. Hope you'll like it and find it useful for your projects. :)
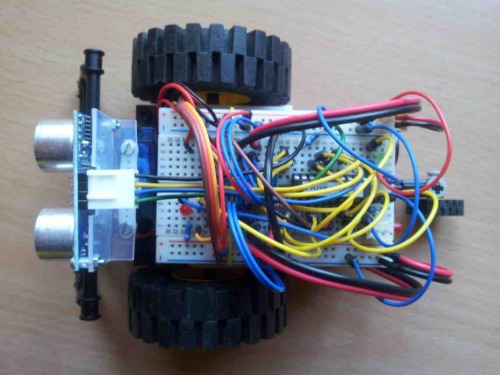

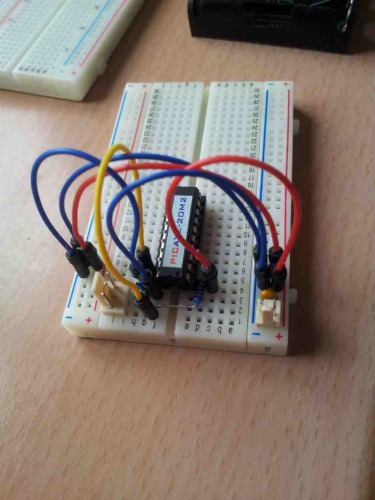
prototyping board:
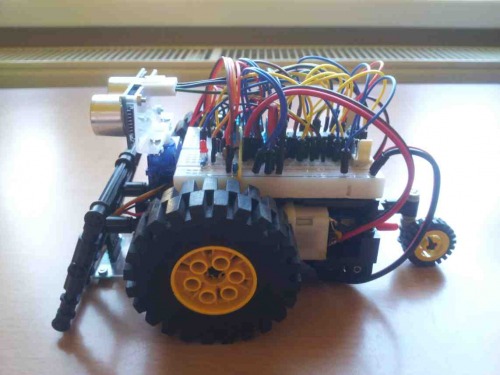
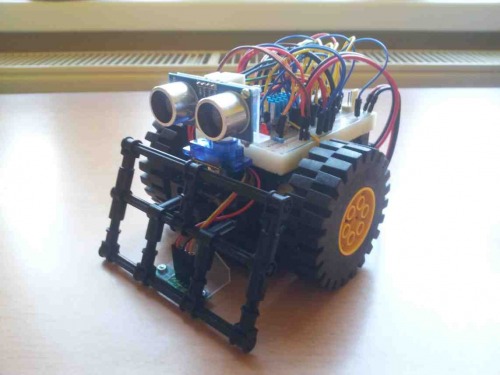
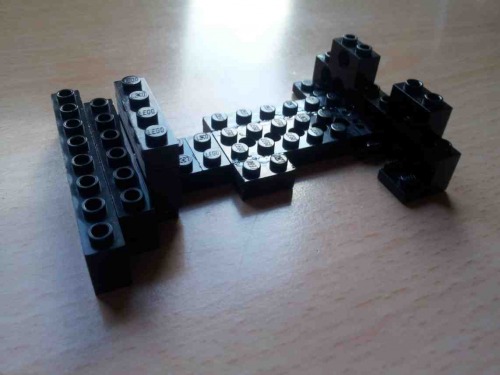
chassis built from Lego Technic:
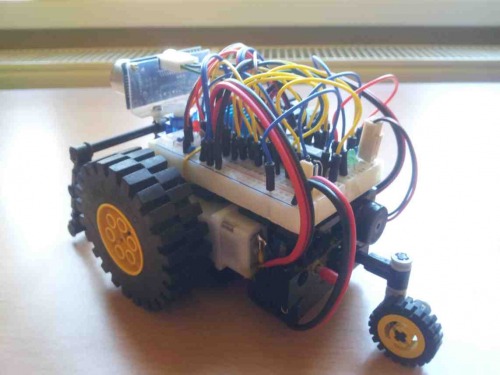
previous version of GajdoBot:

follows a line, pushes other robots out of ring, avoids obstacles
- Actuators / output devices: Piezo, two GM7 motors, SG90 servo, red and green LED
- Control method: autonomous
- CPU: Picaxe-20M2
- Power source: 4xAA and 4xAAA
- Programming language: Picaxe basic
- Sensors / input devices: HC-SR04 ultrasound distance, QTR-3A triple infrared reflectance
- Target environment: indoor