


G.E.A.R.
Generic experimental Arduino Robot
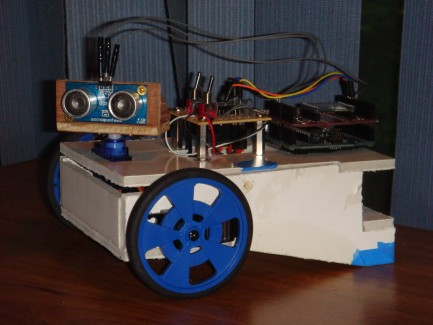
I put this together one or two years ago and have been fiddling with it ever since. The version in the picture lets me control it using a Wii-controller connected to flowstone running on my PC. For most of its life it had a breadboard where the Arduino is.
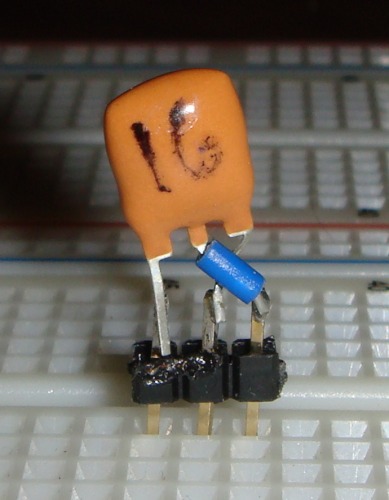
I made this plug in resonator to simplify using a atmega8 on a breadboard.
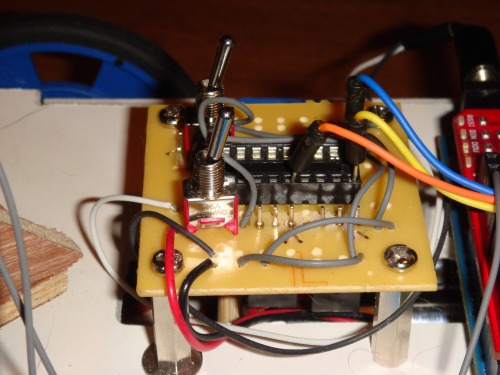
I mounted a 16 pin socket to a small proto-board to use as a patch panel. The underside has 3-pin headers for the servos. It also has separate switches for the processor and the servo power.
The body is foamcore that was cut using my homemade 3-axis machine (it is mostly wood so I cant bring myself to call it a Mill). The CR servos I picked up years ago at the Trinity fire fighting contest. The wheels and micro-servo are from Solarbotics. The Arduino and xbee-shield where gifts. The ping sensor and remaining electronics are from radioshack.
I didn't post the code because its so badly written even I won't use it again. After I learn some of the new serial comm librarys I will write some more streamlined code.
Basic robot for testing code and sensors
- Actuators / output devices: 2 CR servos, 1 micro servo mounted ping sensor (currently unused)
- Control method: Bluetooth -> PC -> XBee
- CPU: Arduino
- Operating system: Arduino, Windows 7
- Power source: 4 AA batteries for motors 1 9volt for Arduino
- Programming language: Arduino, flowstone
- Sensors / input devices: currently none
- Target environment: indoor