



funny walker
this is my funny walker made out of balsa, it tracks objects with two sonic sensors and has two settings, with one setting it will just sit and track with its head and the other it will walk towards and turn towards odjects and back up if it gets to close. unfortunately the robot does not move as quick as i would like without falling over and the lipoly voltage monitor is unreliable.
the robot is powered by 2 aaa batteries to power the picaxe 28x1 and sensors and a lipoly to power ther servos


it has a 10 amp rc plane regulator (bec) to reduce to power to the servos hiden in its head.

The robot uses a picaxe 28x1 on a home made pcd as a brain

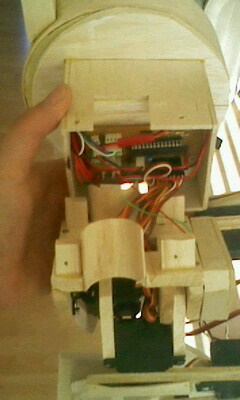
and the sonic sensors are not surprisingly in the head and there are leds around them that light when it sees an object


- Actuators / output devices: 8 servos
- Control method: autonomous
- CPU: Picaxe 28x1
- Power source: aaa and lipoly
- Sensors / input devices: srf02 x2
- Target environment: Indoors. Carpet or smooth floors