


FredBot 1.0
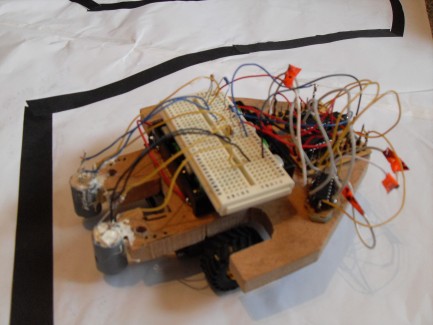
Hey guys i finally got around to finishing my first robot. Thanks everyone at LMR it would still be in hundreds of pieces without the help from you guys! Simply: it follows a black line. it looks like a bunch of wires and a few chips bluetacked onto a piece of wood but apart from the looks i think it works pretty well. i hope you guys like it, any tips or modifications would be appreciated.
I just added another video.
the original video shows the robot with gear ratio 334.2:1 the new video shows the robot running at a gear ratio of 114.7:1.
this makes it a lot faster but it sometimes slips off the line, i also had to increase the operating speed from 8Mhz up to 16Mhz.
Line Following
- Actuators / output devices: Tamiya double gearbox
- CPU: Picaxe 20x2
- Programming language: Basic
- Sensors / input devices: 2 homemade IR Digital Sensors
- Target environment: indoor, Flat