


FrankenBoB
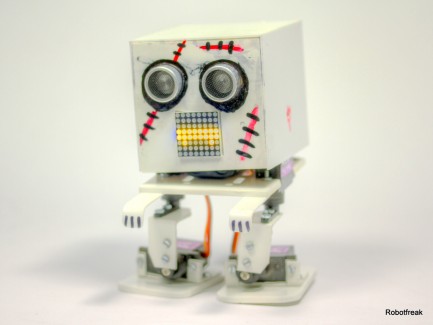
This is FrankenBoB, formerly known as WhiteBoB, my interpretation of BoB the Biped. It is named after Frankensteins creature, because it reminds me, when I see it first move.
Part list:
- Arduino Mini clone Wattduino Pro 3,3V
- 4 x 9G Servos
- 1 x 8x8 minature LED matrice
- 1 x HC-SR04 ultrasonic sensor
- 1 x 3mm Polystyrol Plate
- 1 x 1mm Polystyrol Plate
- 4 x AAA NiMH
- 4 AAA Battery holder
- 1 x Mini Switch
- 1 x 60x30mm card board
- Connectors 2,54mm
- Wires of different colours
- 2 x 30mm M3 Spacers
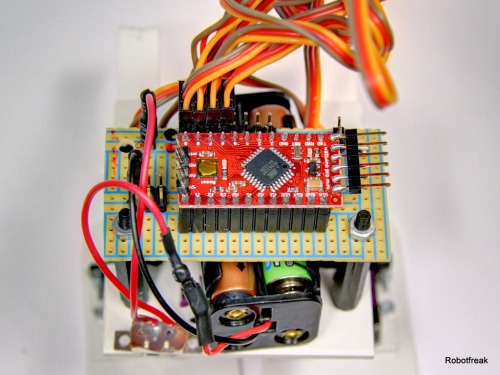
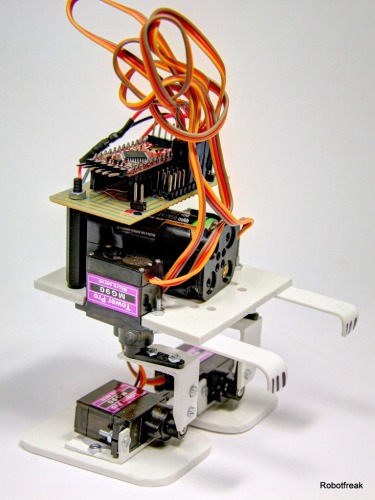
All electronics fits into BoBs head. It is slightly bigger than the original BoB with 60x60x60mm space inside the head. The batteries are placed between the hip servos. The Arduino Mini is attached on a small vero board,with connectors for servos and sensors.
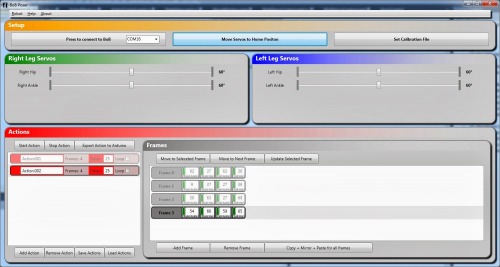
The most time intesive part of this project is the software. It is a little bit difficult to find the right sequences for the servos to move the robot forward. I found the FOBO GUI and adapted it from the 8-servo-FOBO to the 4-servo-BoB. The adapted version is attached. It is very easy to create servo sequences and calibration files and remote control the robot. You can also create a runnable Arduino Sketch with just a mouse click.
Next Steps:
There is no turn sequence at the moment, and the HC-SR04 sensor doenst work. This will be fixed next.
Walks around, avoid obstacles
- Actuators / output devices: 4 x G9 servos
- CPU: Arduino
- Power source: 4 x AAA NiMH
- Programming language: Arduino C++
- Sensors / input devices: HC-SR04 Ultra Sound
- Target environment: indoor