



ForfraBagfra
Update: Just a small new video, nothing really. Just my studies, I use the platform for different testing of stuff. Video and slow motion helps :)
While playing around with stuff to use on another project, the 360Bot, I found some old RC cars. What people throw out, you wont believe it :)
Since I have 360 degrees view on the 360Bot (using a stepper motor), I thought it would be fun to make something that is the same both ways, and steers by "breaking" at the very center.
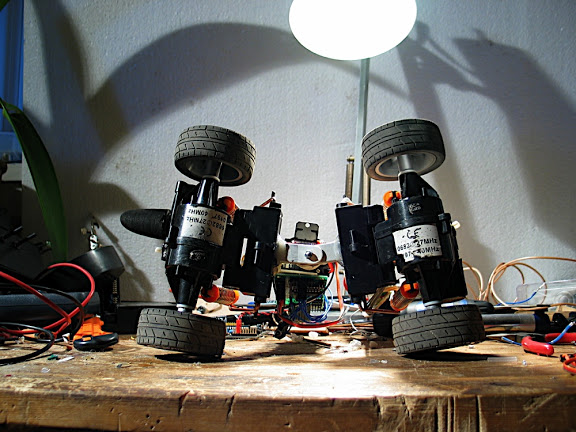
So I took two motors and put one at each end, so it is actually two rears facing each other. Hence the name, it is Danish, meaning something like "front to back".
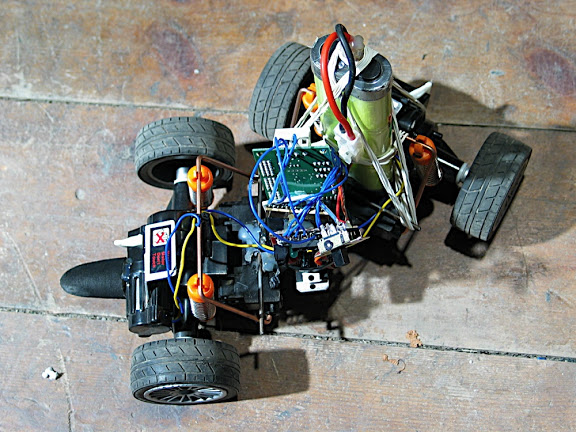
The steering is done by a servo right in the middle: Loced on one side, twisting the other.
I hooked it up with my Joystick / Easy Radio, and I had a remote car to test, before I perhaps add sensors and 360 view. However, I doubt that it will go any further.. But it was fun, so I thought I'd share it with you :)

Testing what one can do with 4W differential drive, and steering by .. erh..
- Actuators / output devices: 2 RC cars gearboxes
- Control method: Easy Radio wireless
- CPU: picaxe 18x
- Power source: 7.2V Tamiya-style racing pack
- Programming language: Picaxe basic
- Target environment: anywhere