


Fluffy (Meccano robot)
My initial intention to build robots came out of being a mostly bedridden invalid, as a sort of surrogate set of senses to travel around the house for me, but I got hooked :-). So Fluffy is more of an accident than a robot (or rather, a series of accidents).
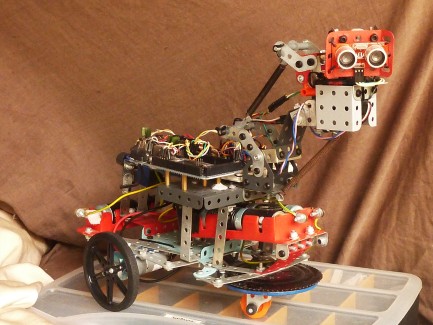
She's been knocked together from Meccano so as to be easily modifiable, and carries an Arduino Mega 2 (originally a Uno clone, but it died), a a simple H-bridge motor controller and a decent-sized breadboard for experimenting with sensors etc. She's the first robot I ever built (or rather, started building), and the way things are going she may be the last, as she never seems to be even nearly finished.
She's a test bed rather than an actual robot, though she does charge around the house avoiding obstacles (more or less) and terrorising the dogs if she's let loose. She did detect light, and beeped faster or slower in brighter or dimmer surroundings, but the light sensor has packed up and I've yet to replace it. She also had an LCD mounted on her back with a distance readout but, as it could only be read when she was close up, I decided it was pointless and removed it. I intend to fit another light sensor to have her reverse smartly out of dark (and therefore enclosed) spaces such as under chairs and beds. I also plan on a sound sensor which will enable her to respond to a clap or shout. Beyond that I haven't really any fixed plans for her.
She's been around in one form or another for a year or so now, I think, and I do bits and pieces on her in between building Lego Mindstorms robots, bots with multiple legs, other misbegotten Meccano and Lego creatures and B.E.A.M. bots (though the Lego bots are the only ones ever to get finished).
If I had my time again, I'd build her very differently; for a start, I wouldn't use Meccano. Though undeniably convenient, it's unfortunately very heavy indeed. When Fluffy runs into your shins, you really know you've been in contact with a Meccano robot. She's a walking (well, rolling) history exhibit of some of my robotics phases, so I probably won't dismantle her or make major changes.
Obstacle avoidance mostly, with light and distance sensing