


FirstBot
This is propably fourth or fitfh evolution version of my first finished and working robot ever built.
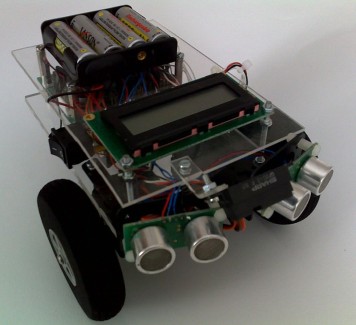
It has Oopic-R controller as brains, 2 cont.rot. modified servos as drive system, 2 SRF04 sonars as obstacle detectors and 1 GP2D12 Ir-sensor to see edges of tables and such. And also lcd-display to help debugging.
It serves as generic testing platform for new hardware and new algorithm ideas. Nowdays i'm more of a arduino-fan but oopic is also nice board.
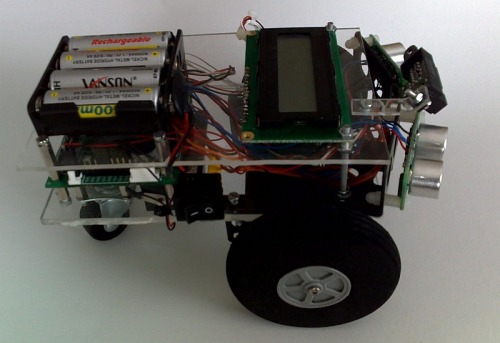
Side view:
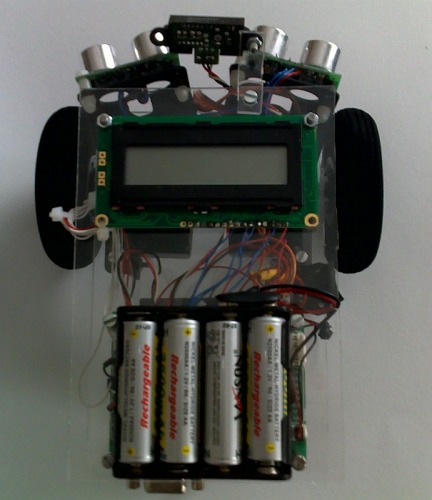
Top view:
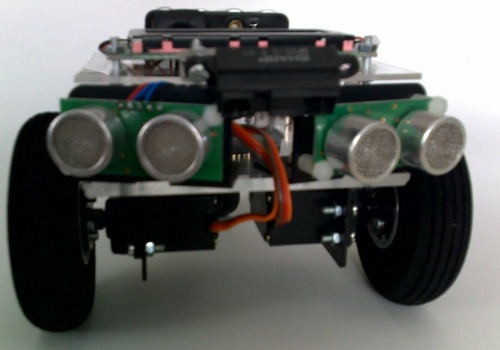
Front (bit blurry):
Roams around, avoids obstacles with ultrasound and ir
- Actuators / output devices: 2 modified servos
- CPU: ooPic R
- Sensors / input devices: SRF04, GP2D12
- Target environment: indoor