



First robot: Traxx
I had a great deal of questions before diving into this project. We all have our little preferences in how things should be. I first focused on choosing the right controller for the job. I settled on an arduino because of the versatility of the board. If i needed to, i could pull the pins, flash a different sketch, and have the board ready for a different project in no time. Afterwards, I could just re-flash the robot control sketch and i'm up and running again. I consider it a great investment.
Second, I am all about style, and do not mind using a few extra dollars to try and make things look sharp. To this end, I decided to use plexiglass, as it is rigid, fairly durable, and i had a huge sheet of it already.
Next up, I had to figure out how i was going to make the little booger go. Did I want wheels? tracks? some sort of hybrid? I think the general consensus here is that tank treads are high in the cool department. A tracked vehicle not only looks cool, but can often tackle various types of terrain, depending on how you configure the tracks. Enter, the Tamiya track and wheel kit. Affordable, and spoken well of by all who have used it. So, decision on tracks concluded.... But how was i going to power them? The easiest answer came in the form of the Tamiya twin motor gearbox. Since it was also a Tamiya product, i could find it in many of the same places i would find the track kit. Also, there would be no fear of the wheels and drive shafts being incompatible.
So, i had all these great ideas floating around, and i was busy daydreaming about them when a question came to me..... I was building a robot, yes. But to what end? I had no idea what i was going to do with the thing. I decided the best idea would be to have a semi-autonomous robot with wifi and a camera so i could control him remotely, and of course he would have to have an airsoft turret and a burning laser, death ray, arms, voice synthesis, AI, machine gun, anti tank rounds....... wait... what the.... ? I had no clue how to incorporate a single (if any at all) one of these ideas into my robot!!! I realized that my dreams of skynet were far, far in the future.... I needed to learn what the hell i was doing first.
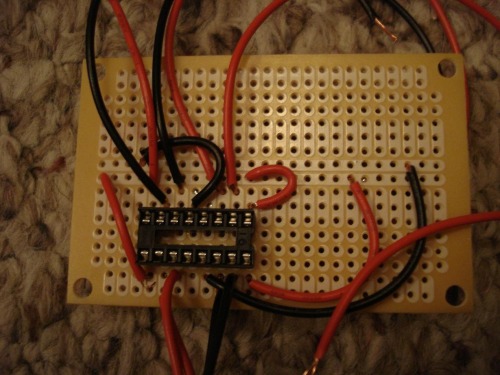
I wired up the H-bridge myself.
I used acrylic to make up the body.

Tamiya track and wheel kit, twin motor gearbox, and SN754410 motor driver.

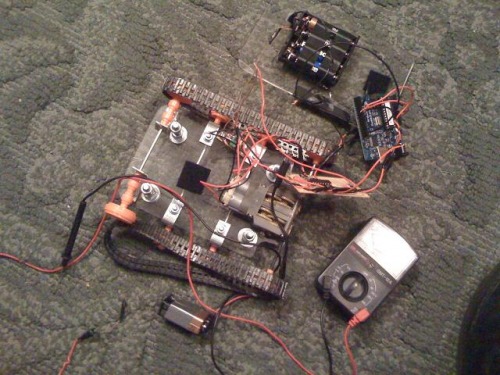
Trying everything out once i got it wired up.
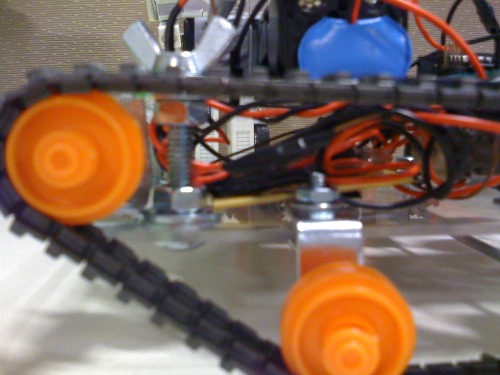
Close up of the idler wheels.
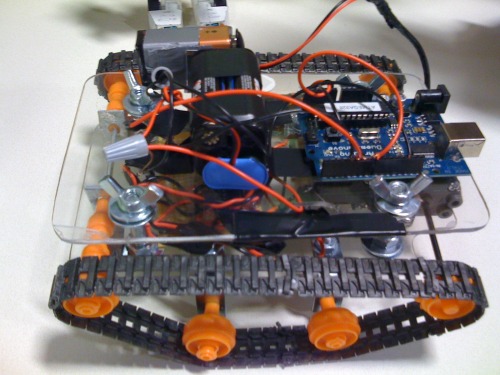
The more or less finished product. I went through about 20 different battery/pin combinations before i settle on 7.2 volts and the pololu motors. In this pic i'm using the stock tamiya motors and a 4x AA battery pack... Not enough cowbell... err.... voltage:
The first video up at the top is how he ran before the pololu motor swap and the higher voltage. The second video is the robot running a series of left turns to test out how well his tracks hold up and how quickly he can zip around.
All in all, I feel quite proud of my work and look forward to expanding my knowledge of processing and C. I have to thank the LMR community for their help and ideas when i started to stonewall. I plan on doing an IR and ping sensor next. After that I will try my hand at IR remote control and add an airsoft turret. I will update when I have more.
Navigates using ultrasound, flashes led lights
- Actuators / output devices: Tamiya twin gearbox
- Control method: autonomous
- CPU: Arduino Duemilanove
- Power source: undefined
- Sensors / input devices: ping sensor
- Target environment: indoor